Вступление: К апрелю 2026 года я готовил новую версию этого поясного компаса. Основной принцип работы поясного компаса не изменился, но двигатели питаются непосредственно от батареи, поэтому микропроцессору не нужно самостоятельно вырабатывать большой ток. Микропроцессор заменен на более компактную модель. Всего 16 двигателей. Ссылка на новый поясной компас находится ниже. Описанный здесь пояс с компасом тоже отлично работает (самый большой недостаток — это большая коробка), поэтому я оставляю текст как есть, но больше обновлять его не буду и буду хранить обе версии отдельно. Ниже приведено хорошее описание процесса изготовления, которое я не буду повторять в новом проекте, поэтому я считаю, что лучше оставить этот текст как есть.

Многие мигрирующие животные, такие как птицы и рыбы, как говорят, знают стороны света при миграции, иногда на очень большие расстояния, днем или ночью, и часто в очень плохую погоду.
Людям такие знания могут понадобиться, например, при сборе ягод в незнакомом месте или просто при потере ориентации.
Компасный пояс — это пояс, который помогает определить, где находится север, не глядя на компас. Он имеет небольшие вибрационные моторы и датчик, который обнаруживает магнитное поле Земли. Когда вы его надеваете, мотор, обращенный на север, слегка вибрирует, давая владельцу «интуитивное» ощущение направления.
Почему это круто? Представьте, что вы находитесь в лесу, собираете грибы в сумерках и теряете ориентацию. С этим ремнем вы всегда будете чувствовать «покалывание» Северного полюса, которое поможет вам не сбиться с пути без карт и компасов.
Я заказал электронные детали в Интернете за около 60 долларов.
Затем я пришил и припаял вибрационные моторы к эластичному тканевому ремню.
Я добавил пластиковую пряжку и использовал текстильную трубку для ее защиты.
Как любитель ориентирования с базовыми знаниями в области электроники, я нашел этот проект одновременно интересным и полезным. Если вы исследуете новые тропы или просто любите классные гаджеты, пояс Compass Belt может стать отличным помощником!
Регулировка направления
Регулировочная ручка для настройки направления 0... 360 градусов
Режимы вибрации
Двойной щелчок для переключения между непрерывной и прерывистой вибрацией. Одиночный щелчок для переключения между 1, 2, 3 или 4 секундами. Длительное нажатие для быстрого тестирования работоспособности всех вибраторов.
Умный датчик
Самокалибрующийся магнитометр, который распознает, идете ли вы, едете на велосипеде или стоите на месте.
Питание от батареек для многочасовой навигации.
Две батарейки обеспечивают примерно 3 часа работы.
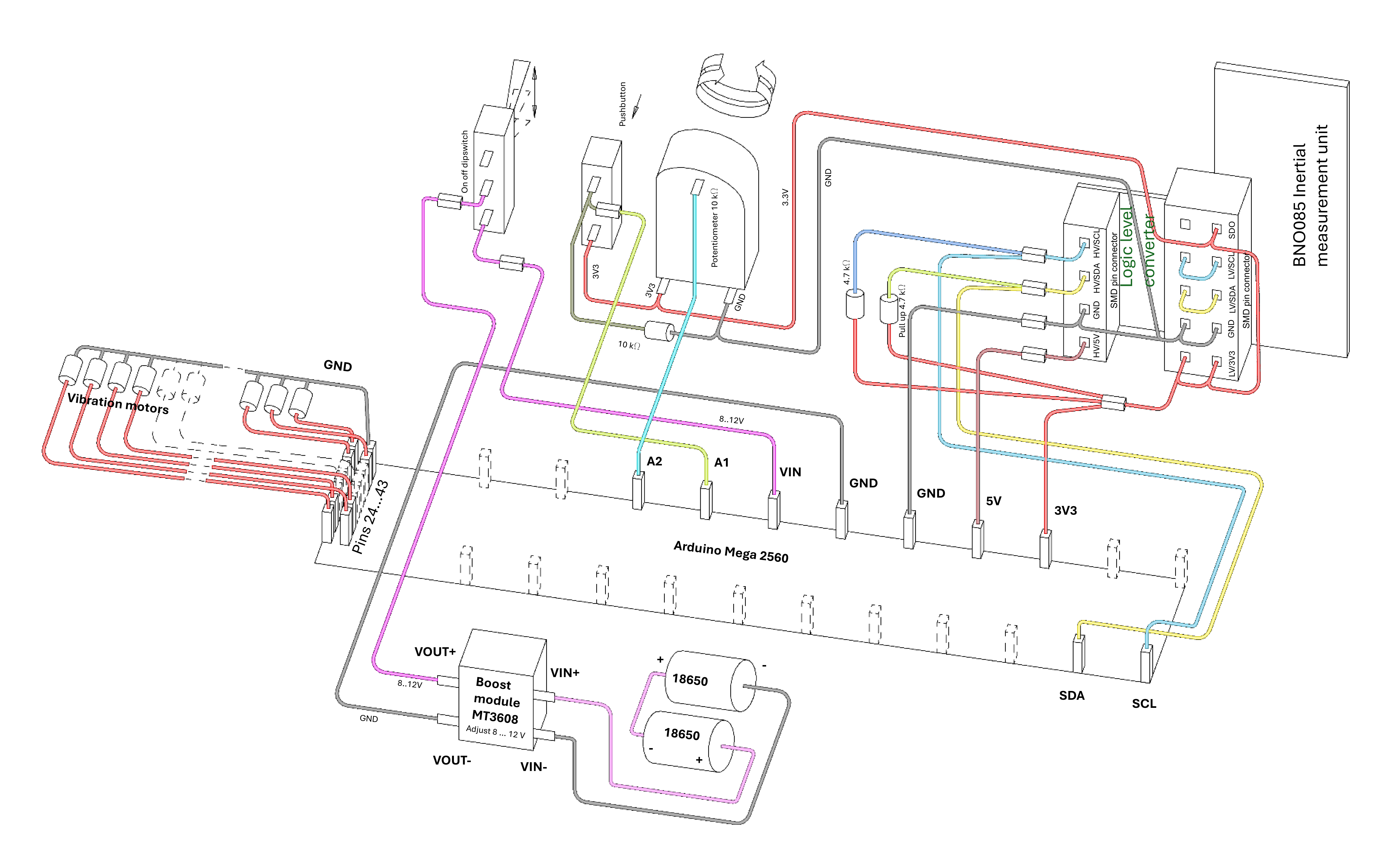
Эта схема предназначена для соединения Arduino Mega 2560 или Arduino Due с различными компонентами, включая двунаправленный преобразователь логического уровня, подстроечный потенциометр, несколько вибрационных двигателей, Adafruit BNO085 9-DOF Orientation IMU Fusion и другие компоненты. Схема питается от батарей 18650 и включает в себя тумблер для управления питанием. Arduino Mega 2560 или Arduino Due запрограммированы для управления вибрационными двигателями на основе входных сигналов от IMU и других датчиков, обеспечивая тактильную обратную связь о направлении на север.
Плата микроконтроллера на базе процессора Atmel SAM3X8E ARM Cortex-M3.
Имеет несколько выводов ввода-вывода, выходы PWM и интерфейсы связи.
Используется для безопасного соединения между разными уровнями напряжения, такими как 3,3 В и 5 В.
Переменный резистор с сопротивлением 10 кОм, используемый для регулировки уровней напряжения.
Два резистора с сопротивлением 4,7 кОм и один с сопротивлением 10 кОм, используемые для ограничения тока и в качестве подтягивающих резисторов для шины I2C.
Несколько небольших моторов, используемых для обеспечения тактильной обратной связи.
Датчик, который предоставляет данные об ориентации с помощью комбинации акселерометра, гироскопа и магнитометра.
Обеспечивают питание цепи.
Используется для управления питанием цепи.
Используется для ввода данных пользователем для управления поведением цепи.
Повышающий преобразователь постоянного тока, используемый для повышения напряжения от батареи.
A2: подключен к ползунку подстроечного потенциометра.
A1: подключен к выводу 1 резистора (10 кОм) и выводу 2 кнопки.
D20/SDA3: подключен к HV4 двунаправленного преобразователя логического уровня.
D21/SCL3: подключен к HV3 двунаправленного преобразователя логического уровня.
5V: подключен к HV двунаправленного преобразователя логического уровня.
GND: подключен к GND двунаправленного преобразователя логического уровня, резистора (10 кОм), подстроечного потенциометра, Adafruit BNO085, модуля Boost MT3608 и вибрационных двигателей.
VIN: подключен к L1 тумблера.
D24–D43: подключены к положительным клеммам различных вибрационных двигателей.
GND: подключен к GND Arduino Mega 2560 или Arduino Due и другим компонентам.
HV: подключен к 5V Arduino Mega 2560 или Arduino Due.
HV3: подключен к выводу 1 резистора (4,7 кОм) и D21/SCL3 Arduino Mega 2560 или Arduino Due.
HV4: подключен к выводу 1 резистора (4,7 кОм) и D20/SDA3 Arduino Mega 2560 или Arduino Due.
LV: подключен к выводу 2 резистора (4,7 кОм) и выводу 2 подстроечного потенциометра.
LV3: подключен к SCL Adafruit BNO085.
LV4: подключен к SDA Adafruit BNO085.
Стрелка: подключена к A2 Arduino Mega 2560 или Arduino Due.
Вывод 1: подключен к GND двунаправленного преобразователя логического уровня.
Вывод 2: подключен к LV двунаправленного преобразователя логического уровня.
10 кОм: вывод 1 подключен к A1 Arduino Mega 2560 или Arduino Due, вывод 2 подключен к GND.
4,7 кОм: вывод 1 подключен к HV3 и HV4 двунаправленного преобразователя логического уровня, вывод 2 подключен к LV двунаправленного преобразователя логического уровня.
Положительные выводы: подключены к D24–D43 Arduino Mega 2560 или Arduino Due.
Отрицательные выводы: подключены к GND Arduino Mega 2560 или Arduino Due.
3,3 В: подключено к LV двунаправленного преобразователя логического уровня.
GND: подключен к GND Arduino Mega 2560 или Arduino Due.
SCL: подключен к LV3 двунаправленного преобразователя логического уровня.
SDA: подключен к LV4 двунаправленного преобразователя логического уровня.
подключены последовательно, + полюс первой подключен к + полюсу второй
- полюс первой батареи 18650: подключен к VIN- MT3608.
+ полюс второй батареи: подключен к VIN+ MT3608.
L1: подключен к VIN Arduino Mega 2560 или Arduino Due.
COM: подключен к VOUT+ MT3608.
VIN-: подключен к полюсу - первой батареи 18650.
VIN+: подключен к полюсу + второй батареи 18650.
VOUT-: подключен к GND Arduino Mega 2560 или Arduino Due.
VOUT+: подключен к COM переключателя.
Pin1: подключен к LV двунаправленного преобразователя логического уровня.
Pin2: подключен к A1 Arduino Mega 2560 или Arduino Due и подключен к pin1 резистора 10 кОм.
Arduino Mega 2560 или Arduino Due программируется с помощью скетча, который включает в себя несколько библиотек для обработки входных сигналов тактильного ремня, компаса и кнопок. Код инициализирует датчик IMU и настраивает вибрационные моторы для тактильной обратной связи. Главный цикл считывает состояние кнопок и обновляет направление компаса на основе данных датчика или последовательного ввода. Тактильный ремень обновляется для обеспечения обратной связи на основе направления компаса.
Github Ремень с компасомБиблиотеки: включает в себя пользовательские библиотеки для управления тактильным ремнем и компасом, а также стандартные библиотеки OneButton.h для нажатий кнопок, Wire.h для связи I2C и Adafruit_BNO08x.h для датчика BNO08x.
Конфигурация выводов: определяет выводы для кнопок и вибрационных двигателей.
Инициализация датчика: инициализирует датчик BNO08x и настраивает желаемые отчеты.
Основной цикл: непрерывно считывает состояния кнопок, обновляет направление компаса и управляет тактильным ремнем в зависимости от направления.
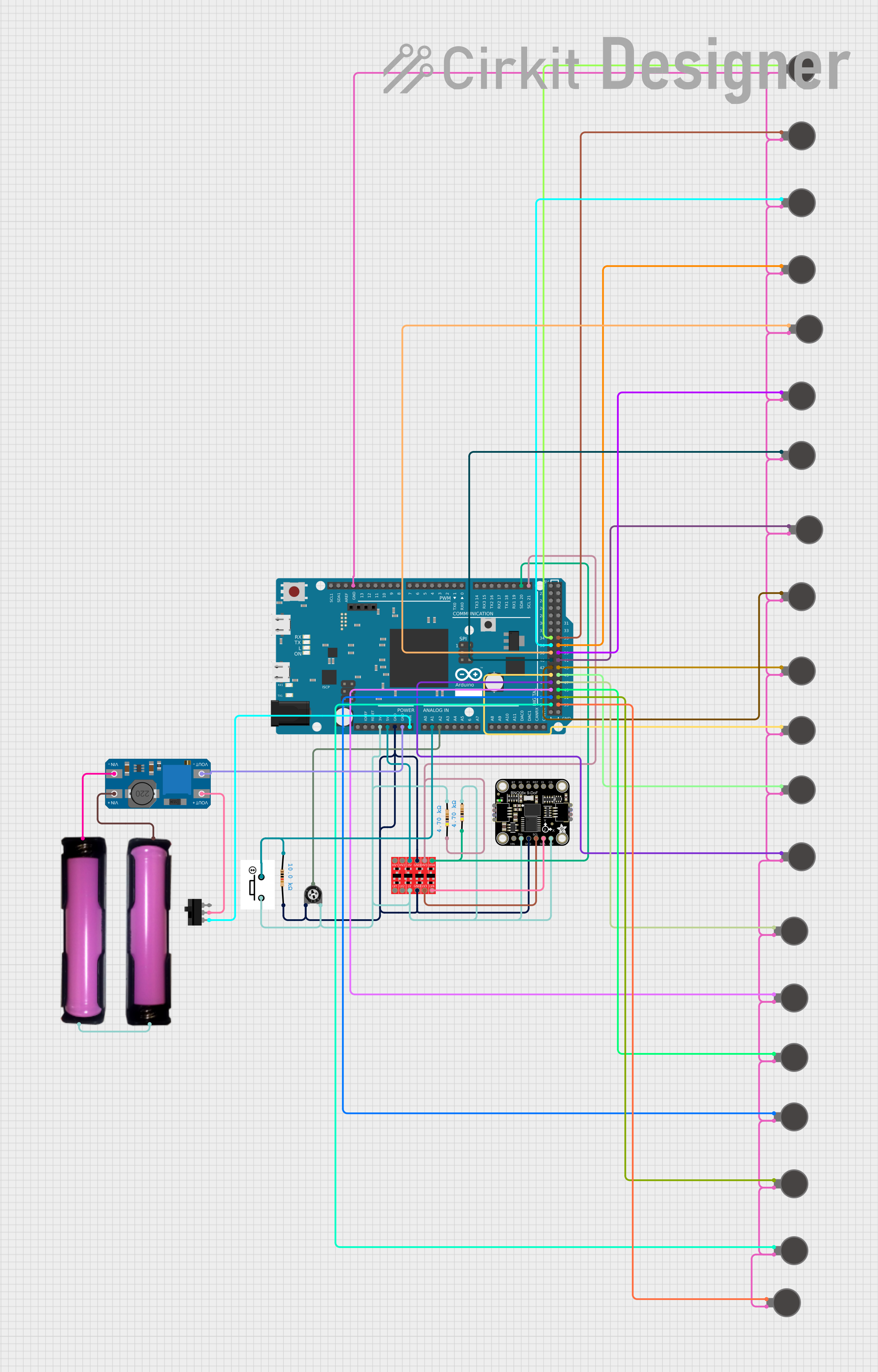
Увеличьте важные части основной схемы
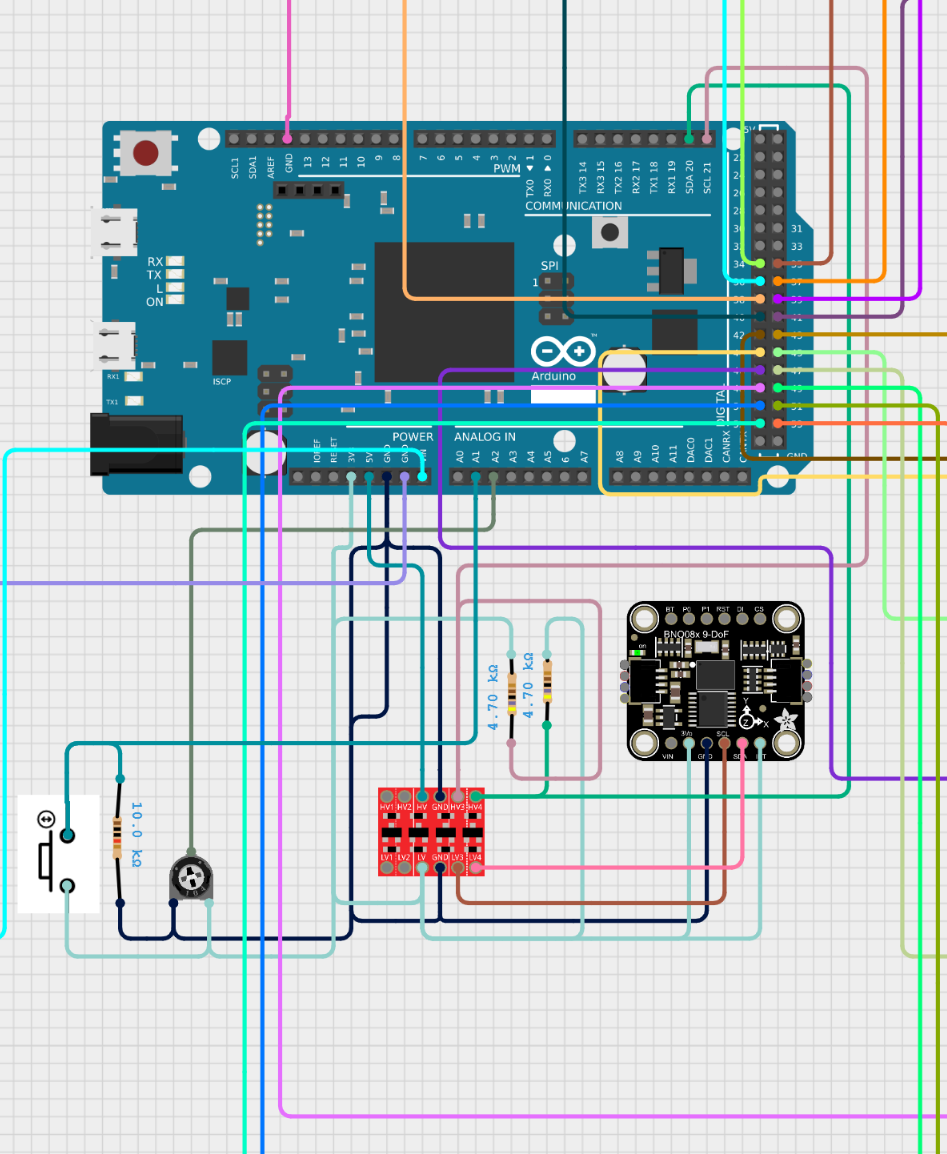
Увеличьте часть с повышающим преобразователем на основной схеме
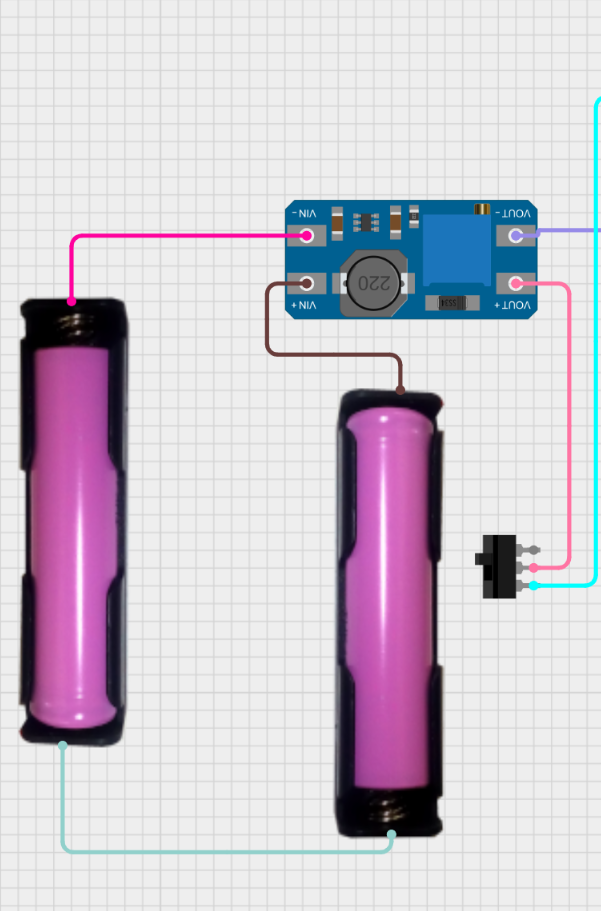
схему электрической цепи. На картинке изображен Adafruit BNO08x, но на самом деле у меня BNO085 slimeVR. Интерфейсы одинаковые.Для устранения внезапного скачка напряжения в индуктивной нагрузке при прерывании питающего тока можно использовать защитные диоды свободного хода. Но в данном случае скачок тока, по-видимому, достаточно небольшой, Arduino еще не сломался.
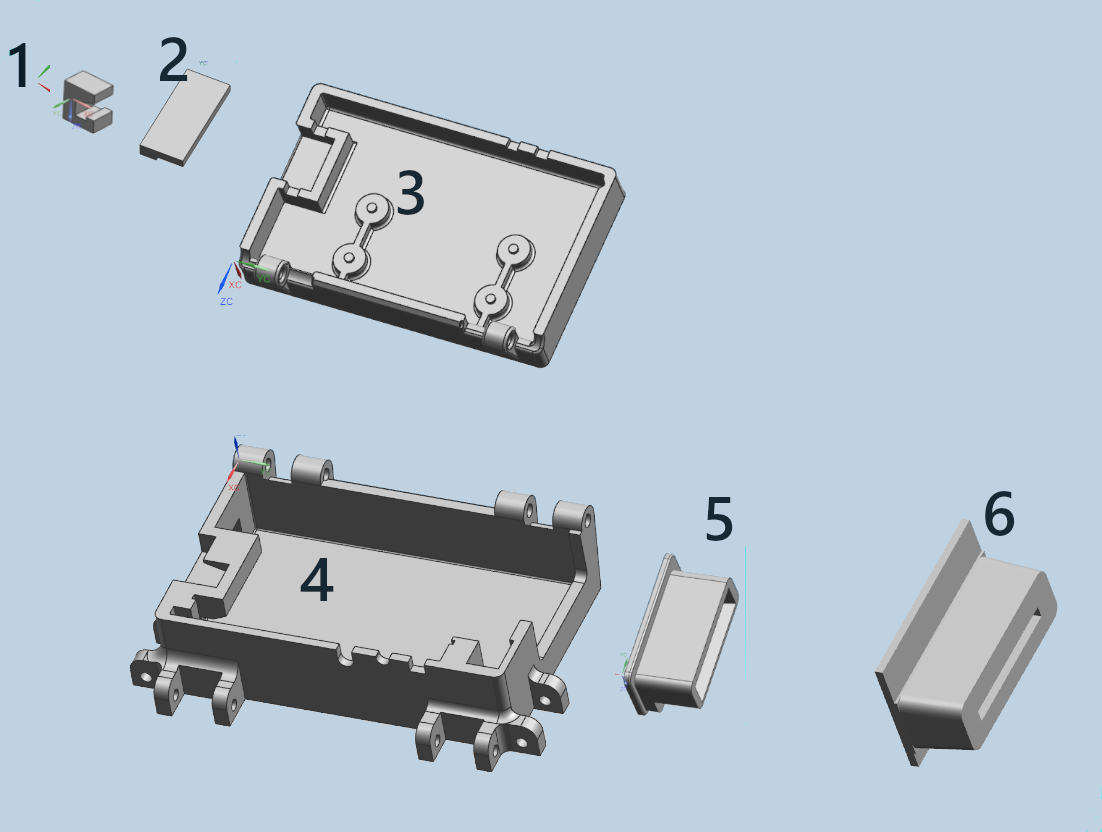
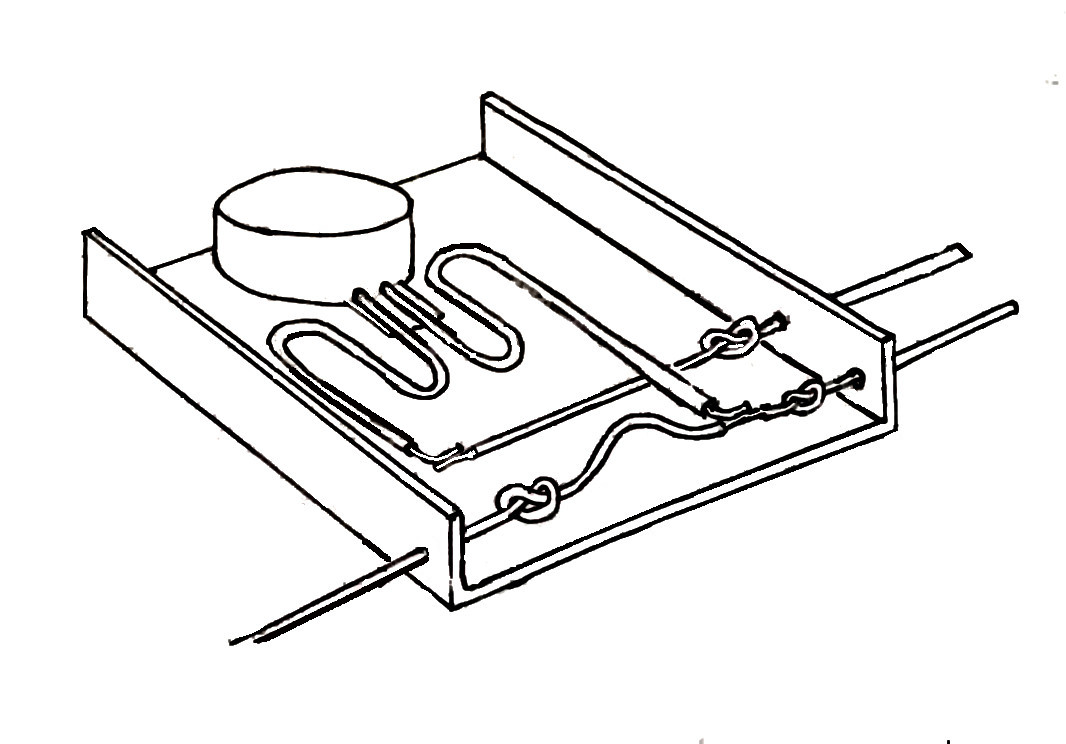
Коробка состоит из 6 различных частей: 1: задвижка. 2: выступ для закрытия паза. 3: верхняя коробка. 4: нижняя коробка. 5: внутренний кабельный ввод. 6: внешний кабельный ввод.
Защелка (1) выполнена в виде зажима. Она может перемещаться вперед и назад в пазу. В пазу есть положение, в котором коробку можно открыть. Однако, если защелку сдвинуть так, чтобы зажим в форме зажима обхватил язычок, коробку больше нельзя будет открыть. Паз создается путем приклеивания детали (2) к верхней части коробки (3). Однако при приклеивании ползунок (1) должен уже находиться в пазу, поскольку после приклеивания детали (2) ползунок нельзя вставить. Это имеет то преимущество, что ползунок никогда не может быть утерян. Верхняя часть коробки (3) соединена с нижней частью коробки с помощью двух петель. Для этого я использовал сварочную проволоку диаметром 4 мм. Ввод кабеля состоит из двух положений (5) и (6). Меньший фланец (5) вставляется в больший фланец (6), но сначала в зазор наносится клеевая замазка. Эта замазка сжимает плоский кабель, создавая хорошее уплотнение. Она также предотвращает выпадение вилок из розетки, когда на плоский кабель действует некоторое натяжение.
Коробка имеет четыре соединения для эластичных ремней, два сбоку и два сверху. Лучшее положение для коробки — на груди. Когда коробка находится на груди, также очень легко управлять потенциометром для регулировки направления, переключателем «вкл/выкл» и кнопкой. По моему опыту, во время бега недостаточно просто держать коробку сбоку с помощью ремня; также необходимы «подтяжки» из текстильных эластичных лент, которые продеваются через петли на руках. Эти «подтяжки» продеваются в вертикальные пряжки. Эти подтяжки предотвращают сползание коробки вниз из-за толчков во время бега.
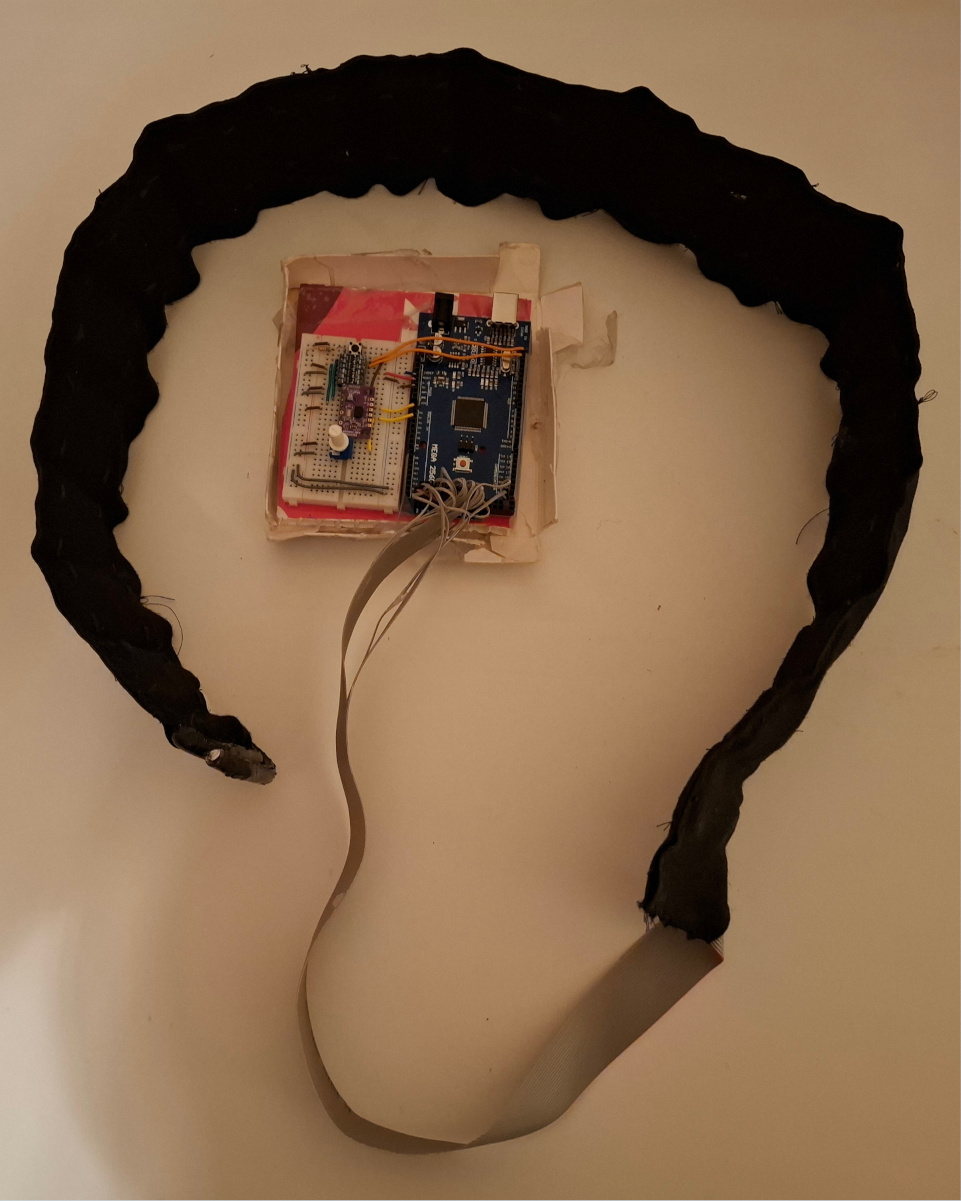
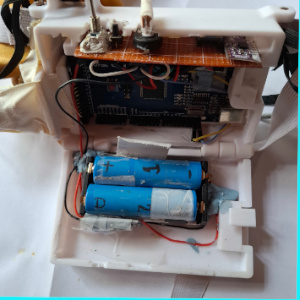
На этой фотографии вы можете увидеть 3D-печатный корпус, открытый спереди. Arduino в центре, разъемы для вибромоторов слева. Здесь вы можете видеть, что провод заземления имеет небольшое «колено» в пучке проводов, потому что разъем GND находится в верхней части ряда разъемов. Справа вверху вы можете видеть датчик IMU BNO085 slimeVR, который прикреплен к проводам с помощью разъема, чтобы датчик можно было легко снять и поменять местами в разных системах. Я поставил разъем еще и потому, что боюсь, что температура пайки может сломать это ценное устройство. Белый провод - это провод SCL, желтый - SDA, но цвета проводов отличаются от схемы. Внизу по центру виден батарейный отсек, а вверху - припаянная пластина переключателя. Все провода Arduino соединены разъемом Dupont, так что все питание может быть полностью отключено. Провода и BNO085 «приклеены» к краям синей резинкой, так что все это можно также временно извлечь из корпуса. Теперь BNO085 помещается в отверстие в левом верхнем углу, но если вы хотите использовать корпус в вертикальном положении, BNO085 можно поместить в отверстие в правом верхнем углу. Датчик всегда должен находиться примерно в горизонтальном положении, чтобы обеспечить правильное направление воздуха.
Здесь вы можете видеть ленту компаса целиком, перед корпусом электроники, слева ленточный кабель выходит к ленте вибромотора, которая защищена желтой тканью. Сам корпус я обмотал вокруг живота собственной эластичной текстильной лентой, или, как вариант, его можно положить в карман брюк. Между кобурой и ремнем есть петля длиной около 30 см, так что кобура может поместиться в карман брюк, поясную сумку или даже рюкзак. У этой кобуры есть два крепления на резинке: одно для горизонтального положения, другое - для вертикального. Я считаю, что горизонтальное положение лучше для бега, так как кобура меньше болтается. Сначала я пытался прикрепить чехол непосредственно к ремню вибромотора, но это занимает слишком много места, и вибрация от вибромоторов под чехлом искажается, а трение между чехлом и моторами может привести к разрыву разъемов и проводов.
Это ремень для компаса с желтым чехлом из синтетической ткани. Эта ткань тонкая и гладкая, поэтому она быстро сохнет, а также ее можно снять, если вы хотите положить ее в стиральную машину. Ориентирование - это пот, и ваше тело постоянно соприкасается с мокрыми и грязными ветками и сучьями. Ткань не должна быть войлочной, когда крошечные концы волокон выступают из ткани, действуя как маленькие крючки, чтобы зацепиться за небольшие трещины в предметах, скрытые кабели и маленькие штекеры, из-за чего небольшие перегибы кабеля или штекера могут застрять в ворсе ткани. Электрическая коробка должна быть закреплена собственной эластичной текстильной лентой. Оба ремня удобно прилегают к телу, так что все это работает и в спортивном ориентировании. Кабель между кобурой и ремнем сейчас излишне свободен, его можно укоротить с помощью резинового ремешка. Нельзя допускать, чтобы корпус электроники разлетался, потому что датчик, измеряющий собственное положение в трехмерном пространстве, будет давать ложный сигнал. В принципе, датчик компенсирует любой наклон, но, как правило, он должен находиться в горизонтальном положении.
Меня не устраивают отдельные провода от arduino к каждому вибромотору. Это создает беспорядок. Решение с плоским кабелем кажется более чистым. Расстояние от букса должно отражать больше истинных направлений, но так как талия человека не совсем круглая, а больше похожа на эллипс, отрегулируйте расстояния между точками мотора. На случай, если люди с большей талией захотят использовать пояс компаса, я использую обхват талии 110 см. Дело в том, что я хочу сделать 2 вибропояса, поэтому я делаю все так, чтобы получить 2 одинаково отрезанных плоских кабеля. Все симметрично вокруг центральной метки. Все концы кабеля я соединяю разъемами dupont, и - что очень важно - я тестирую все кабели, чтобы знать, что нет никаких дефектов, и каждый провод идет от разъема к разъему.
Эластичная текстильная лента с пришитой пряжкой, рулетка и плоский кабель лежат на земле. Я отмечаю среднюю точку. На гибкой текстильной ленте - пробные «гнезда» для вибромоторов, уложенные в отдалении.
Конец женской части пряжки. На самом деле, пряжка шире, чем обычное расстояние между двумя вибромоторами, поэтому будет некоторая ошибка.

Концы плоских кабелей приклеены к полу, поэтому плоский кабель натянут прямо. Количество проводов на плоском кабеле - 26, поэтому крайние 3 провода я оставляю без разреза. Сначала фломастером отмечается место разреза в соответствии с таблицей длины разреза. Затем, после того как все отметки сделаны, их также следует проверить (с обеих сторон, они должны быть симметричными)

После того как все отдельные провода отмечены, я использую нож, чтобы разрезать плоский кабель вокруг отмеченного места. Я прохожу через все отмеченные точки.

Это последний этап. Когда прорезь будет сделана, продолжайте прорезь так, чтобы в итоге оба симметрично разрезанных плоских кабеля разошлись. В завершение сделайте надрезы с помощью плоскогубцев.

Вибрационные моторы поставляются с разъемами JST-SH. Поэтому я приобрел соответствующие женские разъемы. Их необходимо припаять. Штырьки разъемов очень маленькие.

Лучше использовать совсем немного олова, чтобы проволока оставалась как можно более гибкой. Место пайки более хрупкое и не выдерживает такого сильного изгиба.

Я отпаял заземляющий кабель горячим паяльником под лупой. Я крепко зажал плоский кабель с помощью подставки и зажимов. В щель между заземляющим кабелем и другим кабелем я вставил кусок листового металла в качестве подставки. Затем осторожно соскоблите оболочку кабеля горячим паяльником, стараясь не оборвать жилы. Также проведите паяльником под жилами. Я предварительно зачистил все соединительные кабели. При пайке крепко зажимайте провода и паяйте под лупой. Как только вам удастся правильно спаять первый провод, последующие спайки будут намного проще, потому что вам придется только двигать кабель.

Понятно, что паяные соединения легко разрушаются, если кабель постоянно подвергается незначительному изгибу вперед-назад, как это, безусловно, происходит с ремнем компаса. Поэтому я прочно склеил все паяные соединения эпоксидным клеем (двухкомпонентный клей). Поэтому сначала я обмотал скотчем штекер, чтобы образовалось своеобразное «корыто». Затем все концы кабеля с заглушками прочно приклеиваются скотчем к столу, чтобы ничего не двигалось. Затем я смешиваю эпоксидный клей и заполняю все паяные соединения, насколько это возможно, эпоксидным клеем.Затем я жду один день, пока все застынет. На следующий день я снимаю скотч и обматываю изоляционной лентой два проводника.
На фотографии показано, как плоский кабель крепится двумя зажимами. Ниже - проволочная щетка, которую я использовал для удаления расплавленного пластика с паяльника. Поддерживаю устойчивый паяльник с помощью еще одной гнущейся гусиной шеи. Сначала я смотрю мимо лупы, чтобы убедиться, что паяльник находится примерно на цели, а затем смотрю через лупу.

Желтый провод прикреплен к второму зажиму «гусиная шея» снизу. Паяльник лежит на второй «гусиной шее». Обязательно смажьте место пайки паяльной жидкостью. Я стараюсь экономно расходовать олово, так как луженый провод очень хрупок, поэтому лучше всего лудить как можно меньшую длину. Пайка с помощью магнитных гибких зажимов «гусиный воротник» ускоряет работу, так как вам понадобится больше двух рук.

На рисунке показано, как я обмотал электрической лентой выходные провода к вибромоторам, чтобы аккуратно их соединить. На этом месте также может быть термоусадочная трубка.
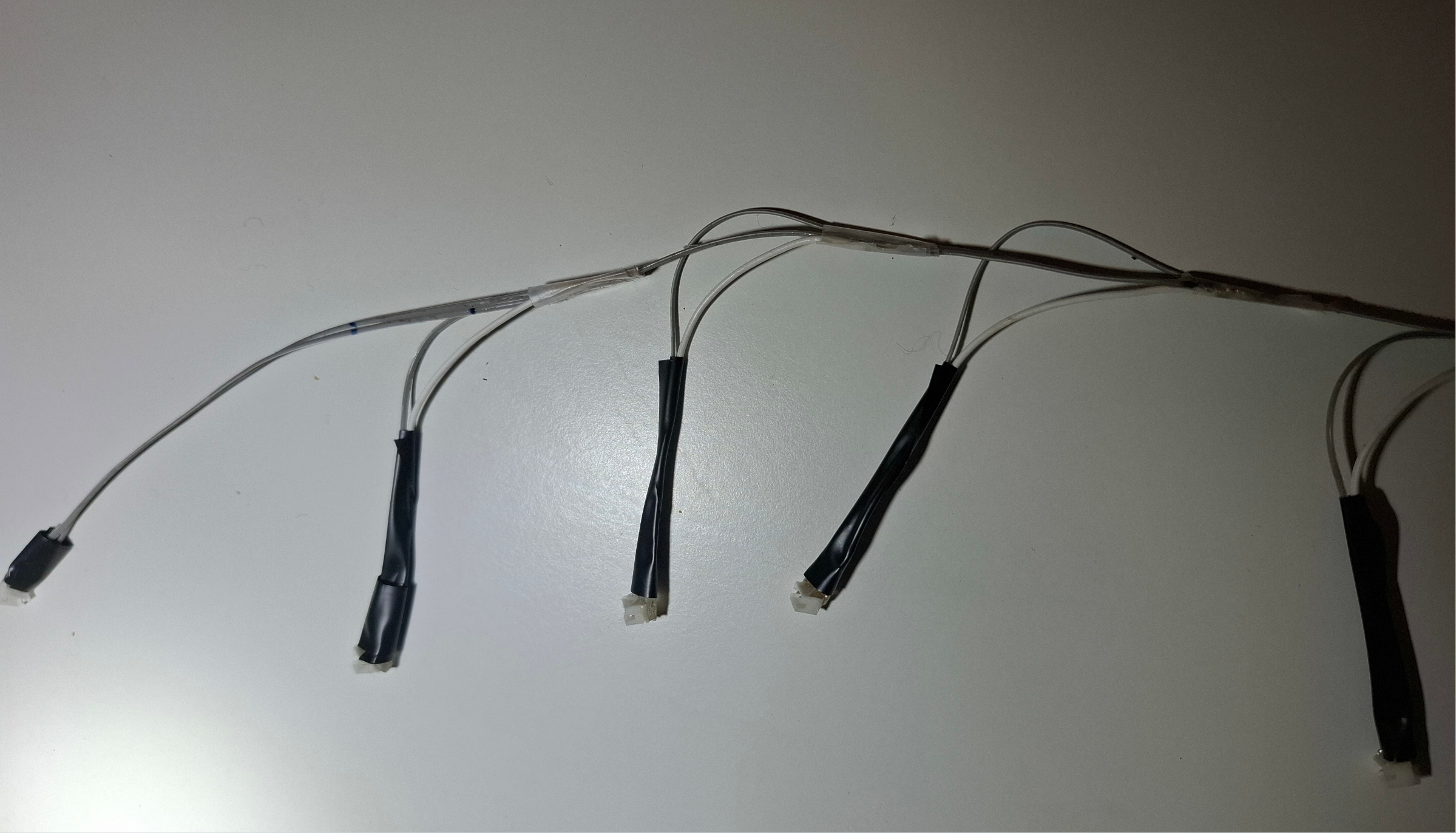
Важно поместить термоусадочную трубку ДО пайки разъема. Затем я припаиваю все разъемы, после чего наношу эпоксидный клей на все места пайки, а затем натягиваю термоусадочную трубку на разъем, когда эпоксидный клей еще влажный.

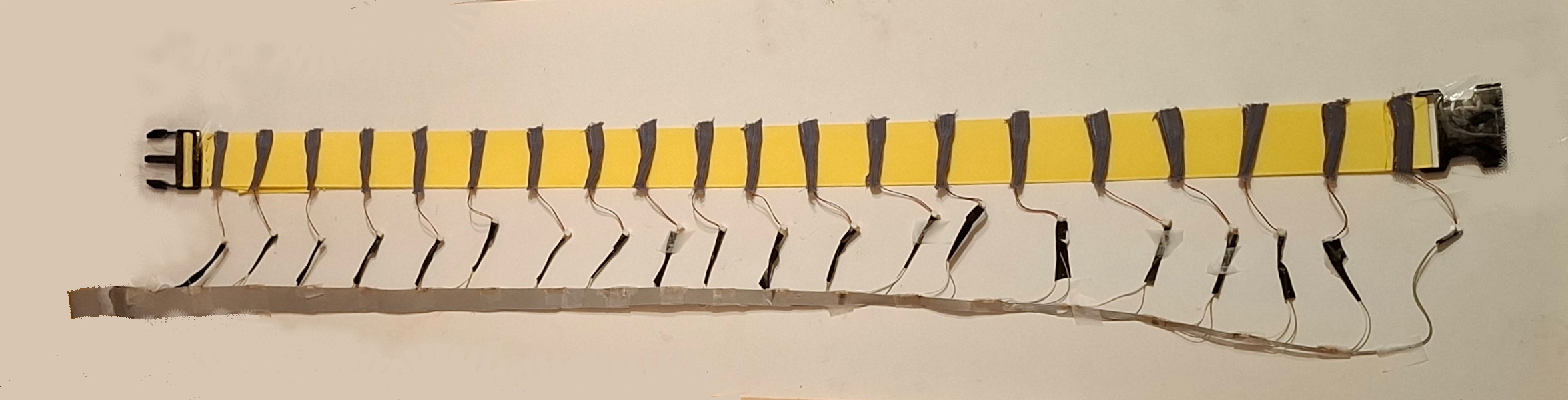
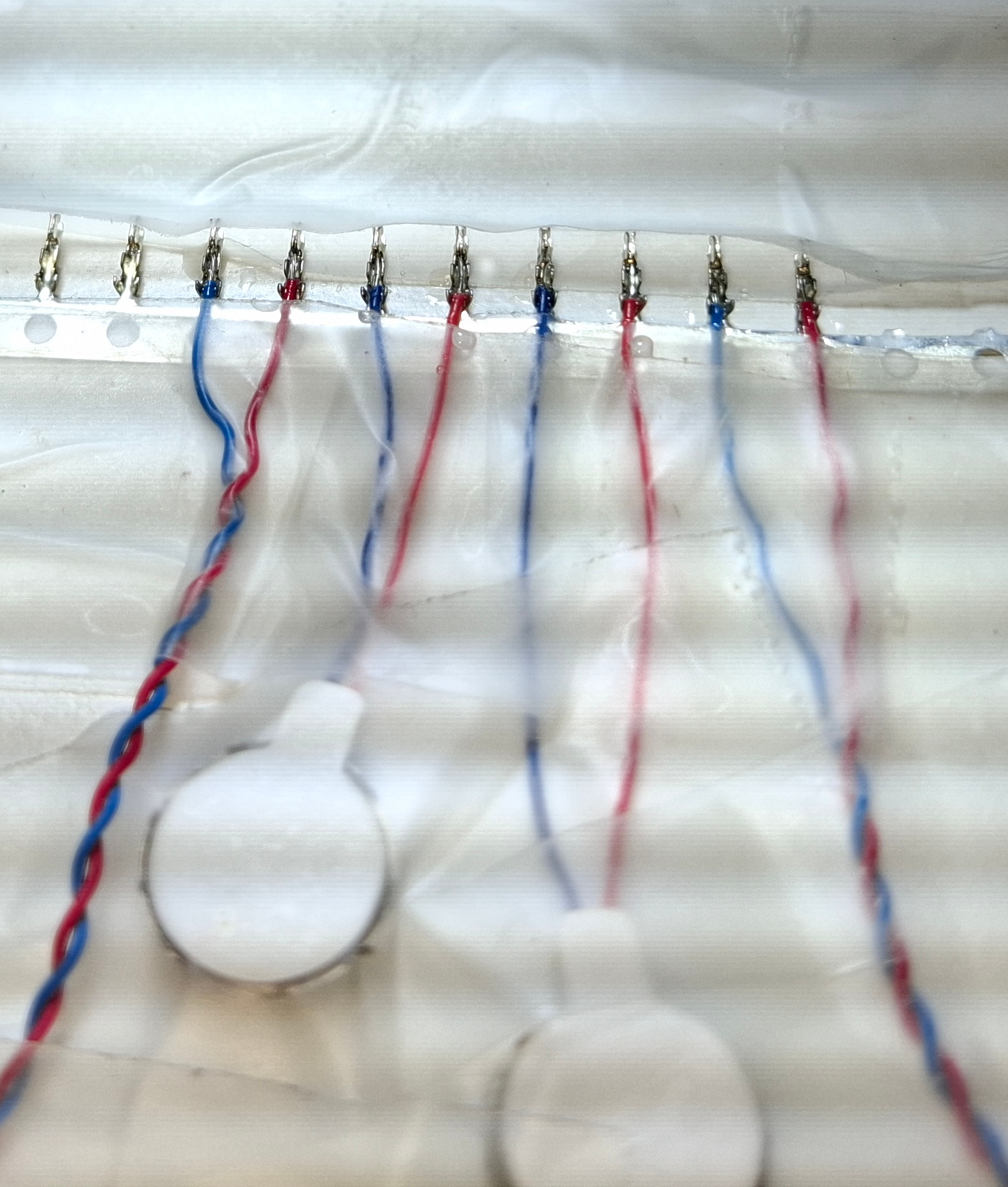
На рисунке показан весь плоский кабель. На этом этапе важно все проверить, чтобы убедиться, что все точки пайки проводят электричество. На мой взгляд, это гораздо более аккуратное решение, чем предыдущий вариант с отдельными проводами, напоминающими спагетти.

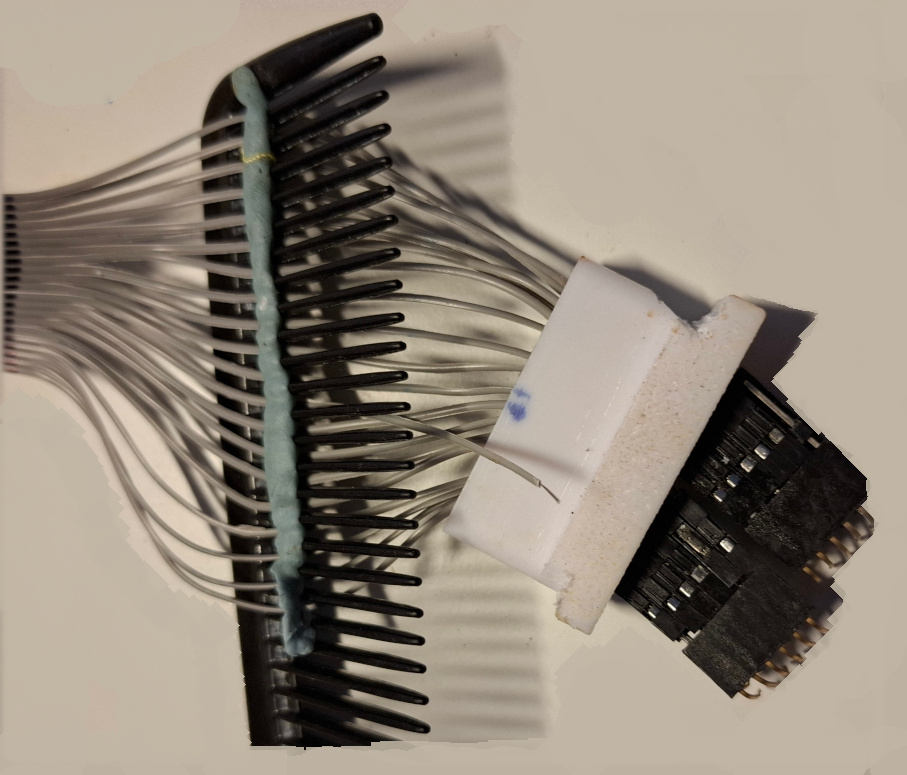
Расположите концы плоского кабеля с помощью расчески. Лучше поместить каждый провод в отдельный зубец расчески. Важно правильно расположить провода на клеммах. При подключении разъёма Dupont к одному концу провода концы других проводов постоянно путаются. Этого можно избежать, используя расческу, как показано на рисунке. Временно приклеив провода синей изолентой к контактам расчески, вы не перепутаете порядок проводов. Синяя изолента также важна: её можно использовать для фиксации компонентов в перевёрнутом виде во время пайки, а также в качестве стяжки, поскольку обычные стяжки слишком велики для этого маленького корпуса.
Здесь показана лента с цилиндрическими вибрационными двигателями. Теперь он имеет желтую сетку для защиты, но на этом снимке защита еще не завершена. Желтая сетчатая лента теперь крепится только круглыми кусочками липучки. Обратная сторона ленты клейкая и легко прилипает к ткани. Сейчас, когда я пишу это, я думаю, что было бы лучше купить шелковистую ткань в магазине тканей, чтобы защитить все стороны пояса.

Я купил вибромоторов для электрической зубной щетки (7x25 мм) с уже установленными штекерами JST ZH. Я сшил трубку серого цвета из эластичной текстильной ленты. Диаметр текстильной трубки составляет примерно 8 мм, а ее длина — примерно 50 мм. Затем я вставляю вибрационный мотор в текстильную трубку и пришиваю ее к ремню. К сожалению, нет подходящей фотографии этого этапа работы. Но идея заключается в том, что вибрационный мотор не имеет проушин для крепления к ремню, но это можно сделать с помощью текстильной трубки. Опять же, на этом ремне я точно определил положение на талии, но у этого ремня такая длинная пряжка, что мне пришлось немного повозиться с линией талии. Когда я пришивала эти трубки, я сначала сделала узел на одном конце швейной нити, но так как это довольно трудоемко, я перешла на то, чтобы просто сделать несколько стежков, а затем, полагаясь на то, что нить все равно будет держаться, просто сделала несколько узлов в конце стежков, и мне показалось, что этого достаточно. Я не стал зашивать концы трубок, так как моторы сидят в них довольно плотно. Я пришил эти серые куски трубок к концам желтого ремня. Затем я вставил вибромоторы в эти серые трубки, подключил их штекерами к ленточному кабелю и протестировал. В отличие от ленты с кнопочными моторами, у этой ленты не было никаких проблем с разрывом соединений, и тестирование показало, что все моторы работают безупречно. Что я понял из этого, так это то, что на практике разъем JST-ZH подходит для пайки гораздо лучше, чем JST-SH, из-за его большего размера. Больше никогда не буду использовать JST-SH.
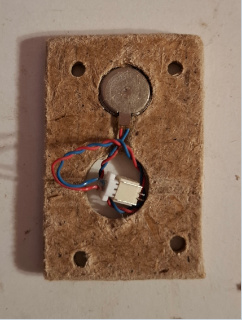
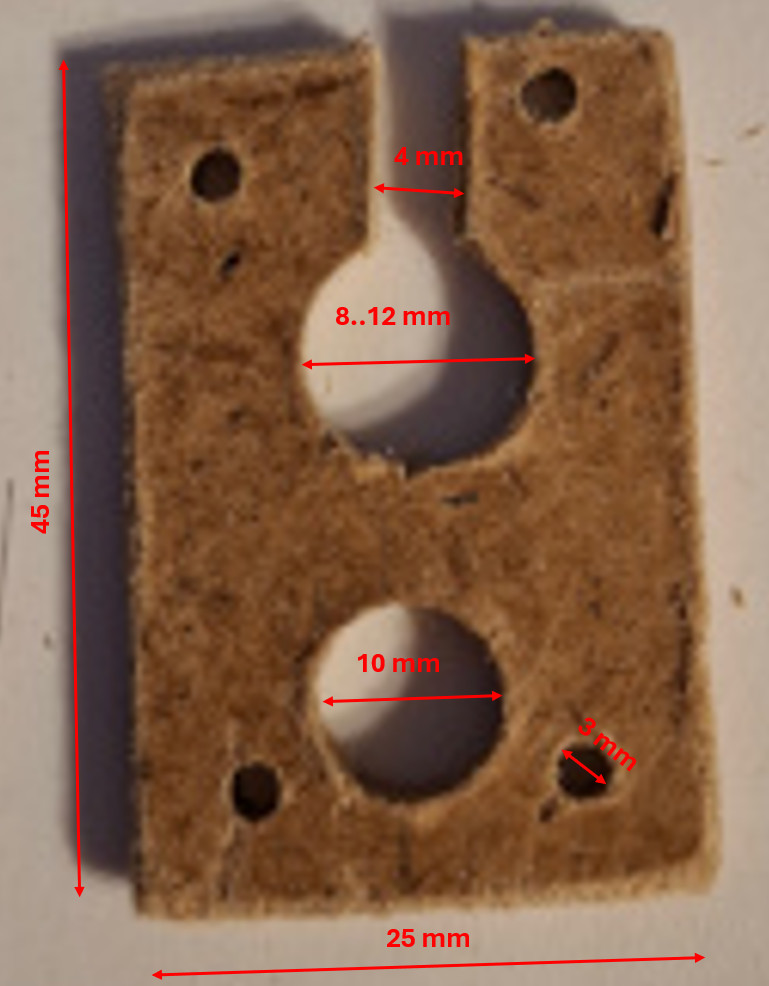
Я купил ДСП толщиной 3 мм в местном магазине древесины. Толщина плиты должна быть 3 мм, потому что это толщина вибромотора. Подходящая высота - 45 мм, потому что ширина гибкой текстильной ленты составляет 50 мм, и я думаю, что корпус вибромотора должен быть немного более узким. Я просверливаю 4 небольших отверстия диаметром 3 мм, с помощью которых затем пришиваю этот держатель к эластичной текстильной ленте. Для мотора я просверливаю одно отверстие диаметром 10 мм, тогда он будет плотно входить в отверстие. Вы можете просверлить несколько пластин одновременно, и тогда под стопкой пластин окажутся 2 дополнительные пластины. Когда вы делаете это таким образом, с нижней пластины не слетает стружка, а все фаски в просверленных отверстиях получаются чистыми и гладкими. Для штекеров JST-SH достаточно сверления на 8 мм. Вибромотор имеет небольшой выходной язычок, и для него нужно сделать небольшое углубление размером примерно 2 мм x 2 мм x 1 мм, иначе мотор не будет плотно прилегать.
У меня нет специализированного обжимного инструмента для штекеров JST-SH. Поэтому я воспользовался советом одного ютубера, который паял только без обжимного инструмента. На этой фотографии показано, как я зажимал штекер с помощью скотча. Для такого маленького штекера было очень важно использовать только очень маленькое количество олова на паяльнике. Если олова будет слишком много, он также заполнит металлическую заглушку оловом, и тогда ничего не получится. Я сжимаю металлическую часть маленькими плоскогубцами, чтобы она точно вошла в маленькую щель штекера. После работы ее нужно проверить. Я также наношу небольшую каплю эпоксидного клея в том месте, где электрический кабель выходит из штекера.
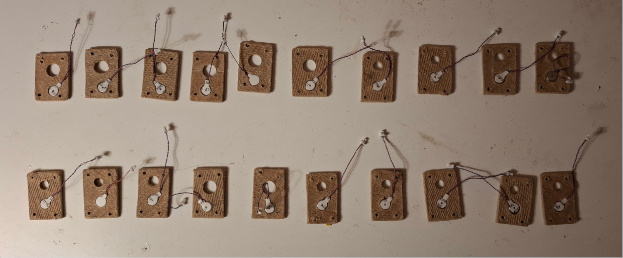
На этой фотографии показаны все 20 креплений двигателя в одном изображении.
В вибромоторе нет отверстий, чтобы пришить его куда-нибудь, а сам мотор лучше прикрепить к корпусу сотового телефона. Поэтому я решил, что лучше сделать такое крепление. Верхняя прорезь между верхним краем и верхним отверстием стала необходимой, потому что конец термоусадочной муфты иначе не вошел бы в держатель.
" На этой фотографии показано, как прозрачный термоусадочный рукав формован вокруг корпуса вибромотора, чтобы плотно защитить его со всех сторон. Я нагрел термоусадочную трубку свечой и немного беспокоился, что мотор не выдержит нагрева, но он хорошо выдержал тепло свечи, по крайней мере, в течение короткого времени. Я наклеил вокруг мотора обычную изоленту, чтобы избежать изгиба кабеля от мотора под слишком острым углом. На этой фотографии видно, как черная термоусадочная муфта входного кабеля складывается в форму «гармошки», чтобы он мог выдержать небольшое растяжение."

Перед тем как пришить вибромоторы к эластичной тканевой ленте, я отметил на эластичной тканевой ленте (B=80 мм) с помощью иглы и скотча точку, где должен находиться вибромотор. Конечно, здесь лучше использовать портновский мелок, но у меня его не было. Потому что на этапе шитья мне приходится постоянно переставлять ленту, когда я шью иголкой с ниткой. Сам ленточный кабель длиннее ленты на 160 мм, так что надеть его сможет даже крепкий ориентировщик.

На этой фотографии все вибромоторы вшиты в растягивающуюся текстильную ленту. Ленточный кабель длиннее, и если правильно растянуть эту текстильную ленту до мощности, то она позволяет использовать мощность 110 см. Но трикотажные носки не растягиваются так сильно, как я ожидал, они довольно жесткие. При растяжении они как бы закручиваются вверх, как будто они сочленены вокруг корпуса мотора, а это не совсем уместно.

Я зашила нижний шов эластичного текстильного пояса по всей длине. Затем я прострочила верхнюю часть только в нескольких местах ниткой, также я нашла круглые застежки-липучки, которые приклеила к эластичной текстильной ленте. Я могу потом легче открыть эту эластичную ленту в случае повреждения кабеля. Я зашил концы ленты, оставив небольшие отверстия сверху и снизу, так что концы образуют петлю, а ленточный кабель теперь выходит через нижнее отверстие. У меня дома оказался 4-миллиметровый алюминиевый провод, покрытый черным пластиком, длиной около 30 см. Я согнул алюминиевую проволоку в форме скрепки и вплел ее в петли ленты, чтобы получилась пряжка.