Meshtastic on siis mesh-verkkoprotokolla, joka käyttää LoRa-tekniikkaa. Se on tarkoitettu erityisesti retkeilijöille, vaeltajille, pyöräilijöille ja muille ulkoilijoille, jotka haluavat pitää yhteyttä toisiinsa ilman matkapuhelinverkkoa. Meshtastic-laitteet muodostavat ad-hoc-mesh-verkon, jossa jokainen laite toimii sekä lähettimenä että vastaanottimena, mahdollistaen viestinnän laajalla alueella ilman keskitettyä infrastruktuuria.
Meshtastic-laitteet käyttävät LoRa-tekniikkaa, joka mahdollistaa pitkän kantaman viestinnän pienellä virrankulutuksella. Tämä tekee niistä ihanteellisia retkeilyyn ja vaellukseen, missä matkapuhelinverkko ei välttämättä ole saatavilla. Meshtastic-laitteet voivat lähettää tekstiviestejä, GPS-sijainteja ja muita tietoja verkossa olevien laitteiden välillä.
Meshtastic-laitteet voidaan konfiguroida ja hallita mobiilisovelluksella tai tietokoneohjelmalla. Käyttäjät voivat luoda omia verkkojaan, määrittää laitteiden roolit ja lähettää viestejä verkossa olevien laitteiden välillä. Meshtastic on avoimen lähdekoodin projekti, ja yhteisö kehittää jatkuvasti uusia ominaisuuksia ja parannuksia.
Olen asentanut Meshtastic sekä online työkalulla että myös VS Code ja Platform IO:n kanssa.
Meshtastic-koodin kääntäminen ja lataaminen laitteeseen Platform IO:n avulla
Viimeinen versio taitaa olla tämä:
https://github.com/meshtastic/firmware/releases/tag/v2.7.15.567b8ea
Seuraava menetelmä perustuu siihen, että minulla on git ja platform-io asennettu.
Windows Power Shell:
Siis pitää vaihtaa mihin tahansa hakemistoon, mihin halutaan perustaa se projekti. Hakemiston nimissä ei saa olla välilyöntejä.
cd c:\temp\platformio\
Sitten pitää kloonata se githubista, missä on se Meshtastic-koodi. Se osoite on:
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
git pull --recurse-submodules
sitten avaan VS Code,
avaan kansion
c:\temp\platformio\firmware
Sitten pitää avata se projekti Platform IO:ssa, ja sitten vain kääntää ja ladata se laitteeseen.
ja odotan kunnes platform IO on tunnistanut
en tiedä, miksi git add . piti laittaa, vaikken minä mitään muuttanut, muttei se muuten antaa vaihtaa branch:in. Siispä:
git add .
Sen jälkeen:
git commit -m "no changes"
nettisivulla luin, että stable version numero on seuraanva:
stable version
v2.7.15.567b8ea
Siispä sen jälkeen:
git checkout v2.7.15.567b8ea
Ja sitten vain käännän ja lataan se laitteeseen.
se toimii Platform IO ja VS Code:n ikkunan alareunalla olevilla ruksi ja -> symbooleilla
Meshtastic-koodin kääntäminen ja lataaminen laitteeseen online-työkalulla
https://flasher.meshtastic.org/


Otin valokuvan minun harrastus-pöydästä: oikealla on pieni hyllykkö, missä lukuiset komponentit: transistorit, Arduinot, anturit, LED:it, potentiometrit, painonapit, johtoja, siruja, vahvistimia, kondensaattoreita, ynnä muuta pientä tavaraa. sen takana on naula-taulukko, jossa sakset, erilaiset pihdit, suurennuslasit, nipistimet ripustettu, niin että ne ovat aina järjestyksessä. Pöydällä oikealla myös juottokolvi ja siihen liittyvät aineet peltirasiassa: juotosneste, kärjen siivous-sieni, juottotina. Edessä on magneettipöytä, joissa on pidikkeet, jotka pitävät juotettavat komponenti paikoillaan sillä välillä kuon teen juotoksen. Vasemmalla yleismittari ja erilaiset johdot, teipit ja lisää työkaluja. Minusta kunnon valaistus on myös tärkeä.
Koska laitoin kaksi kertaa 18650 pariston väärinpäin laturi-yksikköön, aloin miettiä, miten tätä voisi estää. Löysin netistä ohjeen, missä on esitelty kehitys, jossa on askel askeleelta paranneltu. Osoite on:
Tästä olen poiminnut ainoastaan viimeisen suojapiirin:
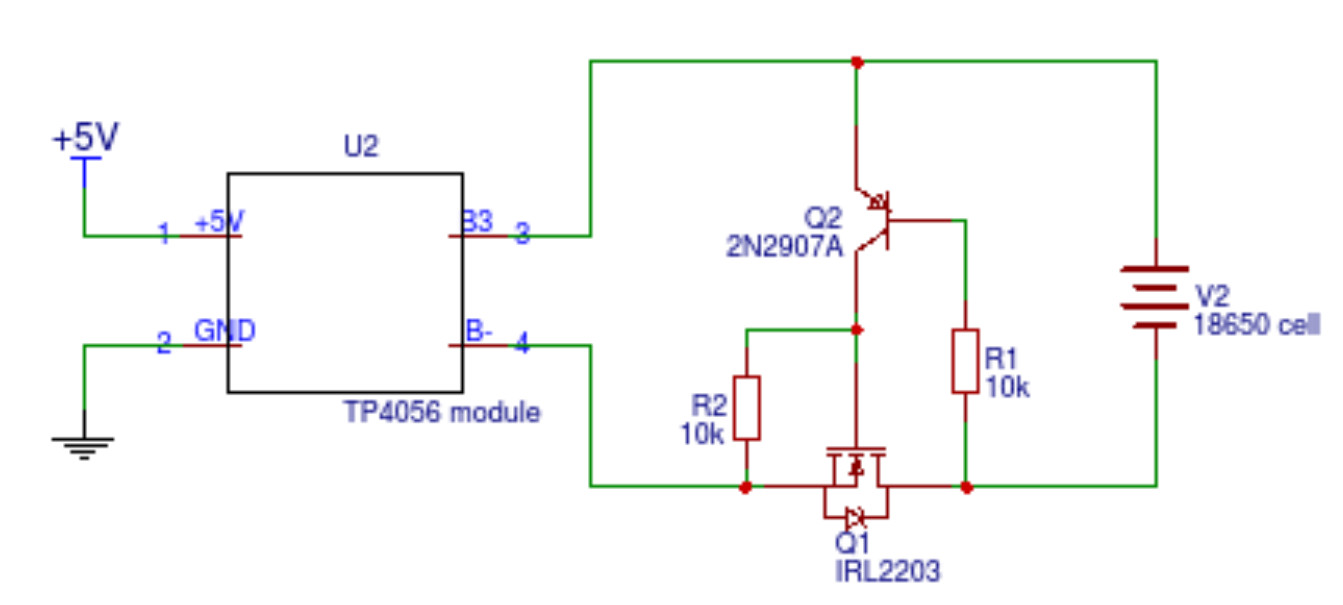
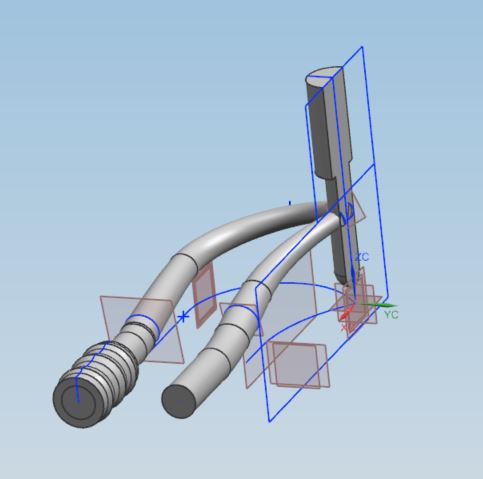
Tein itselleni isometrisen kuvan tästä, koska minulla ei ole aavistustakaan miten MOSFET transistorin nastojen sijoittelusta.
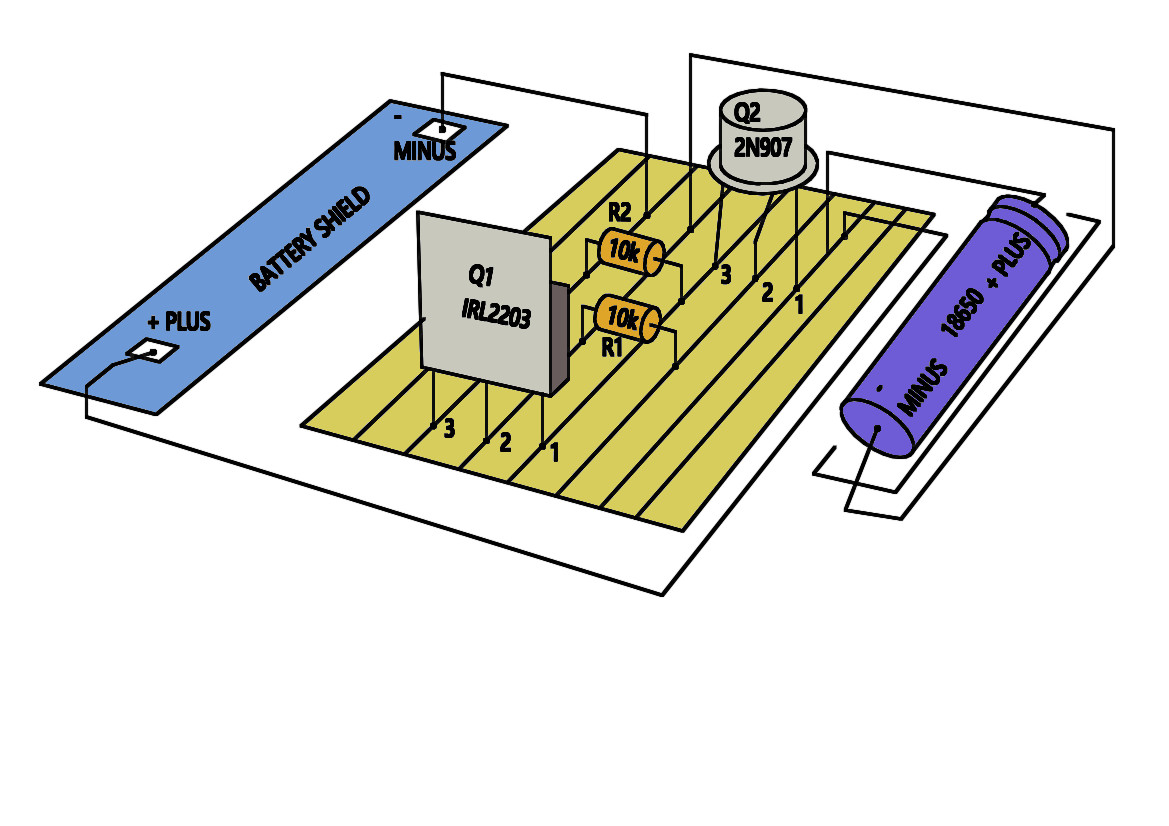
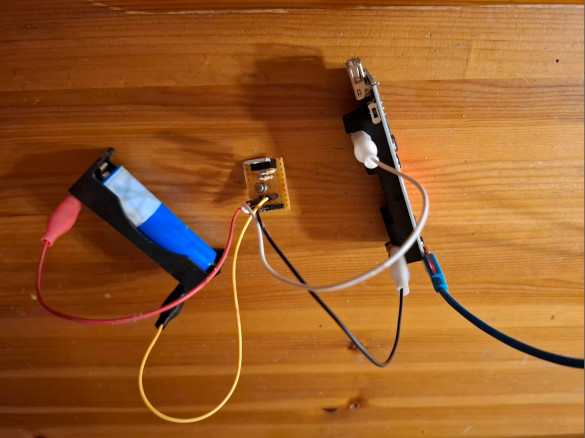
Tässä on valokuva piiristä, siitä näkee minkälaisia johtoja olen käyttänyt ja miten olen juottanut komponentit levyyn kiinni.
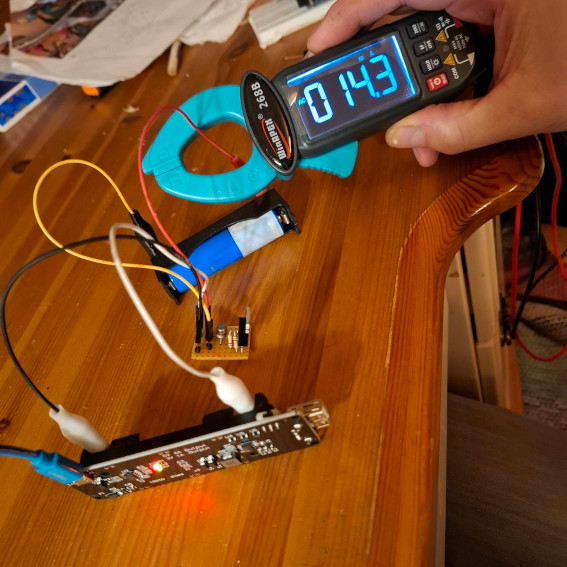
Toinen valokuva samasta piiristä. Laitoin tosiaan ensin 18650 oikein päin kiinni. Tästä ei savu noussut. Olin aika helpottunut. Minun piti kerätä kaikki rohkeuteni, ennen kun laitoin 18650 pariston väärinpäin kiinni. Nyt minulla on uusi yleismittari, jossa on myös virtamittaus- ominaisuus. Oikeinpäin latausvirta oli noin 14.3 mA, Väärinpäin ei ollut ollenkaan virta. Siis se toimii nyt. Juotin illalla vielä toisen kopion tästä kytkennästä, niin minulla on kaksi kompassivyön suojapiiriä.

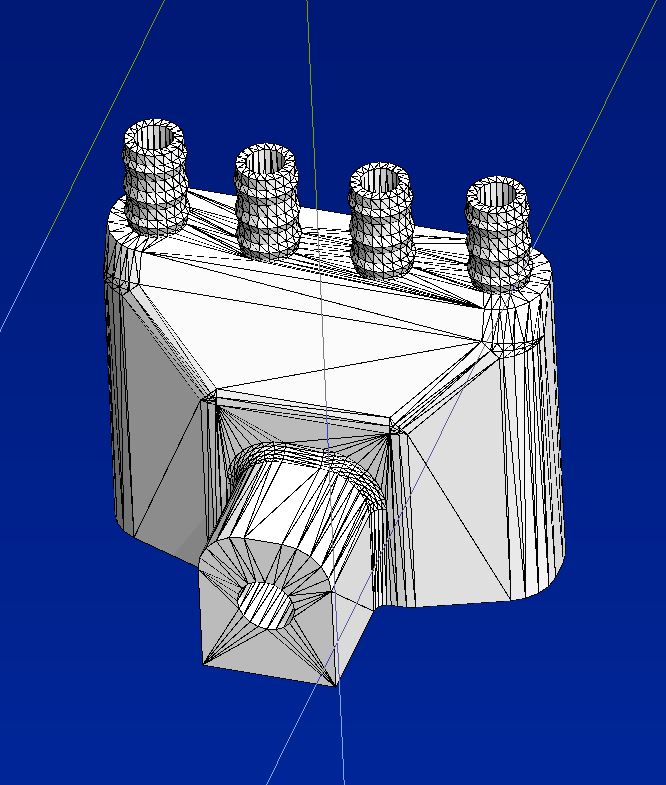
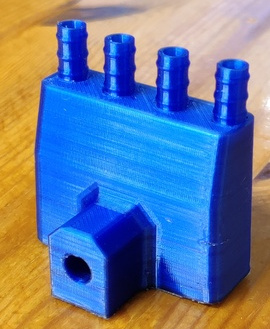
Arduino kukkakastelu-kokoeilujen yhteydessä halusin että neljälle kukkapöntöille menisi aina saman verran vettä. Kuvittelin, että sitä on helppo tehdä, mutta sitä se ei ole. Aina se vesi jostain syystä menee yhteen pönttöön aivan liika, ja toiselle kukkapöntölle ei mitään. Kuvittelin, että jos tekisi samankokoiset reijät, se onnistuisi. Ensin tein muovipalikoista liimaamalla kokeiluversion mihin neulalla pistämällä tein mahdollisimman samankokoiset reijät vähän samanlainen idea niin kuin sairaalan infuusioidan tiputuslaitteet. Ei se toiminnut, aina joku reikä oli pikkasen suurempi ja sitten vesi meni vaan yhdelle pöntölle. Siksi päätin, että jospa kokeilisin 3D- tulostamalla, siinähän reikien pitäisi olla tarkkoja. Ei se silti toiminnut. Sen näköinen sisäpuoleltä näytti puolikas.
Sen näköinen se stl malli näytti ulkopuolelta. Sen mallin "stl" tiedoston tallensin Cloud serverille. (tiedosto oli liian suuri, sitä ei voinut lähettää sähköpostin liitteenä). Kun piirsin sen mallin Unigraphics ohjelmalla (nykyään ohjelman nimi on "Siemens NX") Se oli minulle samalla myös kiva harjoitus 3d-mallentamisessa. Esimerkiksi piti muistaa, että 3d tulostaja ei voi mielivaltaisia ulokkeita, koska siinähän tulostetaan aina muovikerros toisen kerroksen päälle, ja kun se muovi on vähän kuuma, se saattaa mennä vähän kasaan ja menettää muotonsa. Siemens NX soveltuu oikein hyvin erikoisten aaltomaisten ja kurvikkaiden pintojen mallentamiseen.
Siis löysin tulostuspalvelun www.tori.fi verkkosivulta. www.tori.fi on lähinnä käytettyjen tavaroiden verkkomyynti, samanlaista mitä oli ennen keltaiset sivut. 3-d mallin maksoi noin 15 Euro, ja se tuli postilla aika nopeasti. Ei se kokeilu oli siltä sen vaivan arvoista, koska se periaate ei oikein toimii. Veden jakajan pitää olla erinäköinen. Sen toimivan mallin voi löytää verkkosivulta:

Ostin niin sanottuna heräteostona erittäin halvan LIDAR:in. Osittain myös kun näin jo youtube bloggarista, että sellaisia pystyy kytkemään arduino:n. Ja vaikka se robotin rakentelu tuntuu toistaiseksi vielä vähän isolta projektilta, silti saahan minulla olla unelmia. Siis unelma tehdä näistä servomoottoreilla, arduinoilla ja muilla antureilla sellaisen neipöräisen vekottimen, joka osaisi ajella ympärille, ja sen silmänä toimii tietysti tällainen Lidar, niin että robotti ei törmäisi oviin, vaan pysähtyisi aina kiltisti. Siis tämä on vielä täyttä unelma. Unelman toteuttamisen este on ajan ja ehkä myös kärsivällisyyden puute. Aikaa tarvitsisin varmaan monta viikkoa peräkkäin, jolloin keskittyisin pelkästään tähän, mutta enhän voi käyttää kaikki viikonloput tähän, onhan minulla paljon muuutakin harrastuksia ynnä muita pakolliset kotiaskareet. tämä lidarin kokeilu voisi olla se ensimmäinen askel,jolla minun pitkä robotinrakenteluprojektin taival alkaa. Tämä on se linkki siihen, mistä ostin tämän ihmelaitteen.
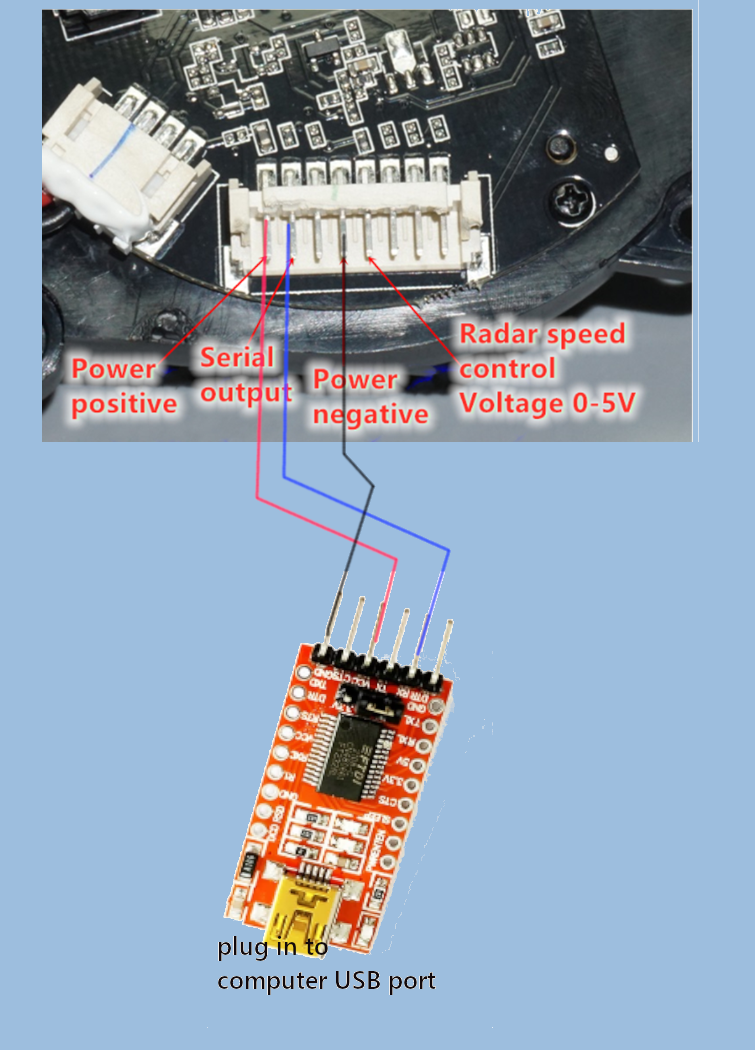
Kun ostin tämän LIDAR:in, kuvittelin vielä, että sitä pystyisi kytkemään arduinoon suoraan, ainakin näin se teki se sveitsiläinen bloggari, missä piti vielä ihan erilainen muunnin, minkä minä myöskin ostin, mutta joka nyt lojuu vielä muitten elektroniikkaromun seasssa. Mutta oikeastaan tämä kytkentä suoraan tietokoneen USB porttiin on ainakin minulle jo helppo, koska ohjelmointi työkalu Visual Studio Code, ja python on valmiiksi asennettu ja minulle kohtuullisen tuttu. Tarvittava liitinmoduuli tietokoneen USB-porttiin löytyy seuraavan linkin alta. TTL tarkoittaa Transistor-Transistor Logic ja wikipedian mukaan nimi tarkoittaa, että transistori sekä vahvistaa että suorittaa loogiset toiminnot. Ei kai se mtään tarkoittaa, mutta se on USB portin ja sarjasignaalin RS232 välinen konvertteri. Muistan vielä että lyhenne RS232 esiintyi C64 tietokoneen kanssa. Linkki:
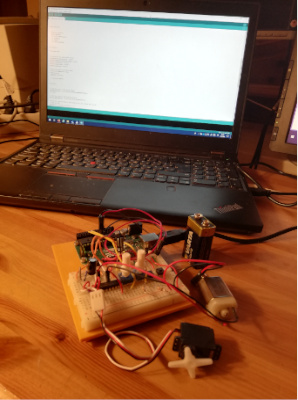
Siinä Lidarin myyntipaikalla on myös viitaus millä hakusanalla löytää sopivat ohjelmapätkät signaalin purkaamiseen. Tämä Discord keskusteluryhmä tuli julkisuuteen sen takia, koska joku Amerikkalainen julkaisi siellä salaisia vaokuvia ja muita tietoja Ukrainan sodasta, ilmeisesti vain kerskailua. Siinä kanavalla mb_1e2tydlidar-s4b on joku mies nimeltään VIDICON, joka on ahertanut tämän lidarin kanssa. Siis ilmeisesti myyjä ei ole antanut minkäänlaista dokumentaatio tästä laitteesta. Ettei sanoisi että se on hyvin tyyppillistä Kiinalaisille toimittajille. Siis VIDICON:illa on näköjään sopivat signaalien analysaattorit, jolla se on vähitellen saannut selville, mitä se datapaketti tarkoittaa, joka se laite antaa ulos.Täytyy nostaa hattu tälle miehelle, kunnioitan suuresti, että sellaisia guruja löytyy tästä maailmasta. Tässä pitää mainittaa, vaikka se koodi tuleekin githubista, ettei se ihan yks-yhteen käynyt , mutta minun piti vähän kokeilla, milla Baud-rate:lla se toimii siis 153600. Minun tietokoneella on siis ollut jo python valmiiksi asennettuna VS Code:lla, mutta siihen piti vielä laittaa lisämoduulit pygame, serial, math ja enum. Oliko sudo apt-get install -y enum tai se vastaava Windows koneella.
Tässä on siis se ohjelma. Se ei ole ihan sama kuin githubin ohjelma, mutta baudrate:n ohella muutin pygame:n käskyn set_at, joka tuottaa aivan liian heikon pisteen ruudulle ja korvasin sen pygame.draw.rect kommenolla, joka tuottaa paljon selkeämmän pisteen. kokeilin myös pygame.draw.circle, mutta se onaivan liian hidas. Muutin myös suurennuskertoimen, distancef = distance / 40 # 40 is the magnification factor sitten kun haluan ennemmän yksityiskohtia esille, oma kasvon profiili esimerkkinä, silloin laitoin tämän kertoimen 3:ksi. Aika huonosti tunnen kuitenkin pygame:n ja se koko ohjelma on minulle melkein kuin hepreaa, varsinkin tämä class State(Enum). Pitää joskus vielä ajan kanssa perehtyä.
LIDAR kytkintä tietokoneen USB portille
Kokeilin LIDAR:in toiminta kulkemalla asunnon ympäri
Tämä taitaa olla aika yleinen harjoitus. Olen hirveän laiska kastelemaan kukkia, se unohtuu usein viikkotolkulla, ja haluan että kukkaa kastellaan automaattisesti pumpulla aina kun vesi on loppunut. Asetelmaan kuulu Arduino Uno, vesipumppu, vesiletku, veden tunnistin ja Arduinon sovituskortti, ja sininen relee.

Arduino ohjelmakoodi
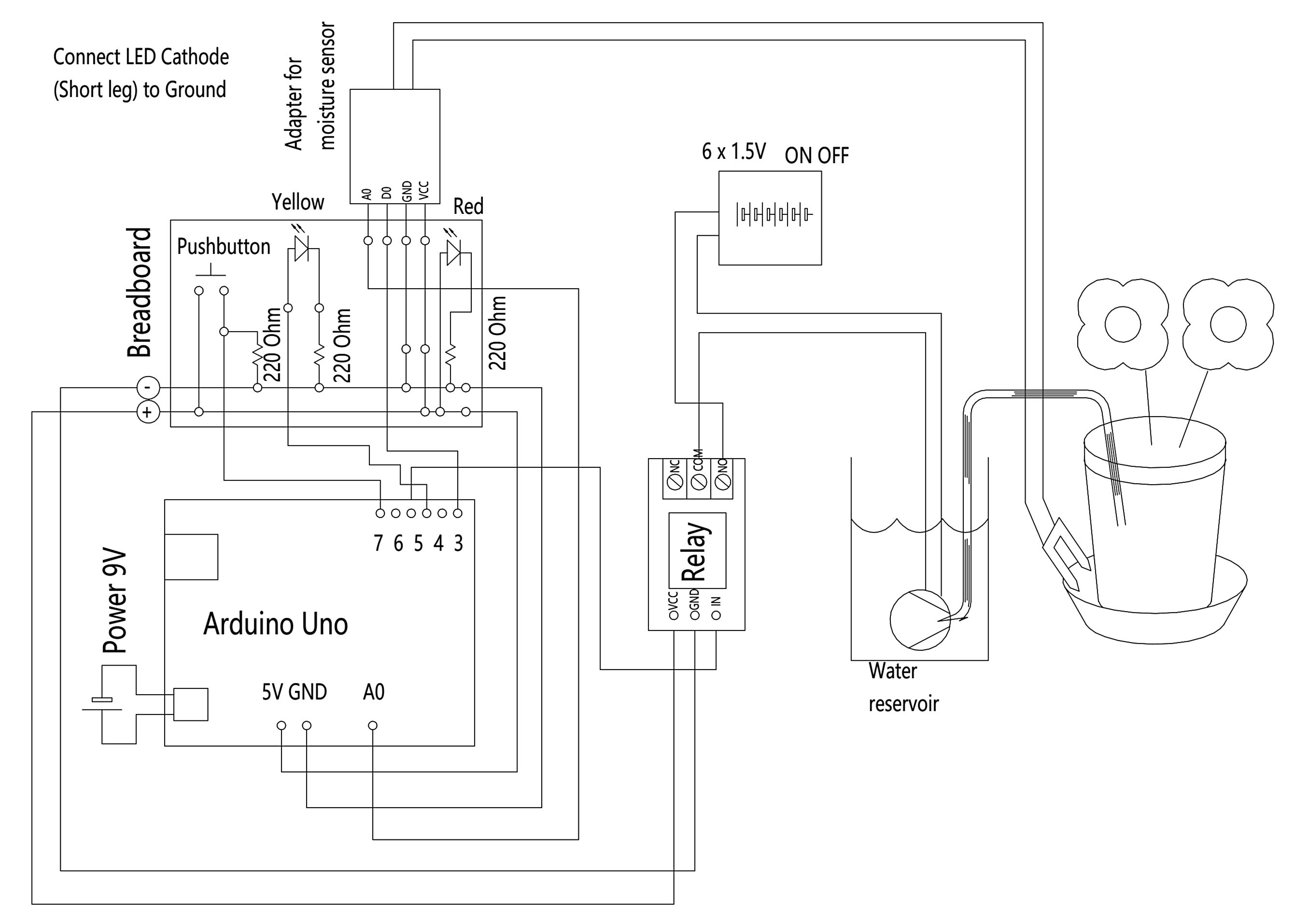
Kopioin valmiin ohjelman. Yritin etsiä itselleni haasteen. Alkuperäisohjelmassa on delay- käsky, ja sillä estetään, että pumppu käynnistetään heti kun on anturi on tunnistanut, että vesi on loppunut. Mutta siinä vaiheessa ohjelma sykli loppuu. Tässä uudessa ohjelmassa ohjelmasykli ei koskaan keskeyty, mutta ohjelma syklin aikana triggeroidana 2 eri laskuria. Ensimmäinen laskuri käynnistyy, kun anturin tila on mennyt märkä -> kuivalle. Sen jälkeen annetaan mennä pitkä aikaa, ennen kuin pumppu käynnistyy, koska ei ole väliä että kukka on vähän aikaa kuivana, mutta on tärkeämpi, että pumpun paristo ei menee tyhjäksi sen takia koska pumppu käynnistyy aina vähän väliä. Toisaalta, heti sen jälkeen kun pumppu on käynnistynyt ja alkaa täyttämään vettää kukkaruukulle, pitää nopeasti sammuta pumpun kun anturi tunnistaa veden, koska muutenhan se ruukku valuisi yli ja vesi valuu lattialle ja tekee siellä vahinkoa. Siksi toinen laskuri melkein sammuu sen pumpun heti kun anturi tunnistaa veden kukkaruukun alla olevassa lautasessa. Tässä projektissa tuli sitten ensimmäistä kertaa kokeiltu releen käyttö, siis periaatteessa Arduinolla voidaan kytkeä myös oikeita verkkolaitteita, kuten lamppua, pistorasiaa, lämmityspattereita, radiota, ym. Mutta tämä tuntuu vielä vähän vaaralliselta, joten kaikki laitteet tässä vaiheessa toimivat ainoastaan paristolla. Lisäys: Ongelma ensimmäisen kytkennän kanssa on, että säiliö, mistä vesi otetaan, on tyhjä. Siksi siinä vaiheessa, kun pumppu käynnistyy, pitää estää, että pumppu kävisi jatkuvasti ja niin pumpun syöttöparisto tyhjenisi, vaikka ei ole toivoakaan että pumppu lisäisi vettä kukille. Koska pumppu käy tyhjänä, ja pumppaa ainoastaan ilmaa. Siksi pumpun käynnistäessä alkaa oma laskuri, ja kun laskuri on saavuttanut raja-arvon eikä kosteuden anturi on indikoinut märkää, pumppu ei menee enää päälle ja samalla punainen LED valo menee päälle. Sitten, kun näen, että punainen LED on päällä, käyn lisäämässä vettä vesisäiliöön. Sen jälkeen painan reset-napin. Reset nappi laittaa punaisen valon pois päältä ja asettaa pumpun käyntiaikalaskurin taas nollaksi. Joten seuraavalla kerralla kun anturi ilmoittaa, että kukka on kuivalla, pumppu alkaa taas pyöriä. Mutta ellei vesi on lisätty säiliöön, pumppu ei pyörii, koska se olisi pariston energian tuhlausta. Tämä laskurin arvo pitäisi sitten sellainen, että siinä ajassa säiliö joka tapauskessa tyhjennetään kokonaan.
tässäkin projektissa oli debuggaus kaikesta eniten aikaa vievä. Minua alkoi häiritä tosi paljon Arduinon sisäänrekennetun Serial monitorin ominaisuus, ettei siellä voi puhdistaa ruudun "clear" komennolla. Siitä löysin pienen Python apuohjelman netistä, joka kirjoittaa sarjaportin signaalin terminal ikkunalle, niin että jokaisen syklin jälkeen terminal ikkuna putsataan "clear" komennolla.

Alunperin minulla oli sähköisesti loistavasti varusteltu naisten pyörä. Siinä oli LED etuvalo ja LED takavalo, jolla oli vielä seisontavalo-toiminto. Valoa tarvitaan lähinnä talvella, vaan talvella tiet ovat lumen takia aika röpelöisiä, niin että ensin tärinässä irtosi takavalo. Sitten minulla on tapana irrottaa napageneraattorin kesäksi. Siinä pitää tietysti irrottaa myös etuvalon, joka hajosi samalla. Jujuhan siinä LED valossa on se, että siinä on sisäänrakennettu kaikki elektroonniset piirit, jotka vaihtavat napageneraattorin virran LED-valolle sopivaksi tasavirraksi. Ajattelin ensin ostaa LEDin, jonka voi kytkeä suoraan napageneraattorin, mutta en löytänyt. Mutta löysin netistä ohjeen USB laturille. Tilasin osia netistä (Farnell, conrad) ja kasasin keittiöpöydällä. Ja tilasin myös USB- LED valon. Yhden talven pyöräilin sen kanssa, mutta nyt olen taas hukannut sen LED valon. Täytyy taas ostaa jonkun LED valon. PS: Nyt kait tilasin sopivan mallin Ebay:sta "Union LED Headlight Sidelight Sensor Lux for Hub Dynamo"
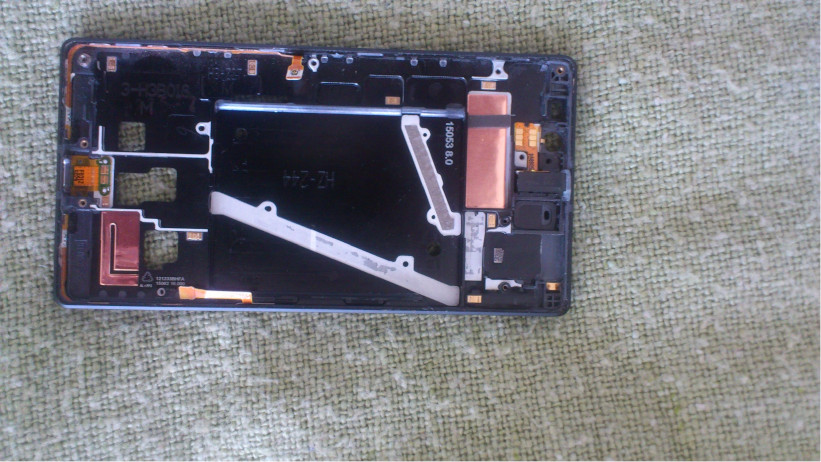
Olin joskus ylpeä minun Lumina älykännykästä. Vaan ei kestänyt kauan ja se tippui lattialle. Ja niinkuin voilepää menee aina voipuollella maahan, niinhän tämä luuri meni naamapuolella mahalaskulle. Se tapahtui ehkä 2 viikkoa ostamisen jälkeen, en voinut sietää ostaa uuden heti. Onneksi työkaveri neuvoi, että näitä ruutujahan voi ostaa erillisenä netistä, ja sitten niitä voi korjata itse, koska ruudun mukaan tulee kaikki tarpeelliset työkalut, ja ohje tulee netistä. Niinhän sitten pakon edestä tein. Kyllä oli muutamia kauhun hetkiä. Siinä tarvitaan lämpöpuhallinta, jotta noi kaksipuoliset teipit irtoaisivat. Ja todella kärsivällistä täytyy olla siinä ettei käytä väkivaltaa.
Paljon kiitoksia tubettajalle, näiden ohjeiden avulla onnistui

Onneksi siihen aikaan minulla oli vielä toinen älykännykkä hallussa, niin että pystyin toistaa ohjeet yhä uudestaan samalla kun selvisin kaikista lisäongelmista

Kännykän sisäisten liittimien nastat ovat hiuskarvan paksuisia. Tosiaan korjauksen jälkeen oli pakko painella koteloa tietyn liittimen kohdalla niin että sain ruudun taas näkyviin. Paristo on tiukasti liimaattua koteloon, sitä saa vain kuumailmapuhaltimella ja samalla muovivivulla vääntäen ja silti kestää noin puoli tuntia ennen kun se irtoaa. Sama asia oli ruudun kanssa, koko ajan pitää kuumentaa. Eikä saa liika voimaa käyttää, ettei riko koteloa. Tietysti uuden ruudun pitää myös liimata kaksipuoleisella teipillä, siis pitää leikata noin 2mm levyiset raidat normaali 2-puoli-teippirullasta.

Kirjastossa kompastuin Tero ja Kimmo Karvisen "Sulautetut" kirjaan. Ei se heti vielä johtanut mihinkään, mutta se oli vähän niin kuin hiljalleen kytevä hiillos, joka alkoi vaivaamaan minun mieltäni. Myöhemmin vasta kuulin vielä että kansalaisopisto olisi järjestämässä kurssin siitä. Kurssi ei toteutunut, mutta ostin tämän starter-kit:in. Katsotaan mitä siitä vielä tulee.
Olen tehnyt aikaviive- videoita älykännykällä. Selvä ongelma on, ettei aikaviivettä voi asettaa, ja toinen, että kamera tarvitaan kuitenkin koko ajan olla mukana, sitä ei voi jättää mihinkään. Siihen tarvitaan: 1. ESP32CAM (Alibaba) 2. 5V virtalähde (Tokmanista) 3. USB kaapeli, tästä vain koiras litin (Clas Ohlson) 4. Kaksi johtoa, toinen puoli naaras liitin, joka sopii ESP32 CAM neulamaisille ulosotoille, toinen puoli krokotiilinipistimet. 5. SD korttilukija + siihen sopiva USB kaapeli 6. SD kortti. Löysin netissä ohje, miten tehdään koppi 3-D tulostimella. Tässä se toimii myös pulkupyörän korjaussarjan. Siihen kiinnitin liimalla erilaisia puurimoja. Siihen vielä joudun kaivertaa pieniä lovia puukolla, koska muuten RST ja flash nappi häiritsevät.
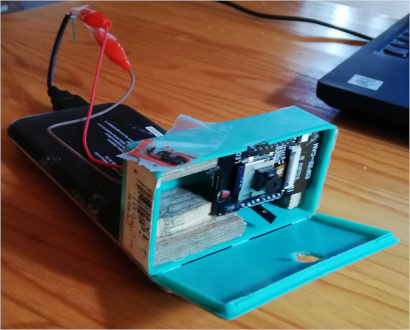
Takana on reikä 5V ja maadoituskaapelille, niiden naaras-pistoke on valitettavasti vähän liian pitkä. Kannessa on reikä kameralle, sen voi tehdä poralla. ESP 32 pitää istua aika tiukasti, muuten se notkuu ja kuva on vinossa-
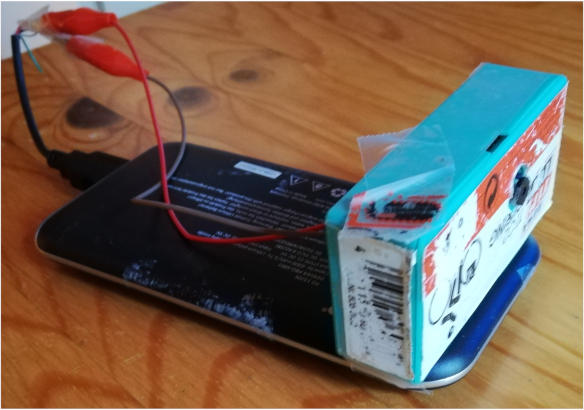
Jos pelkää, että sade sattuisi kuvauksen aikana, voi ESP 32 laittaa kynttilän tuulosuojan sisälle. Tuuli on aika kova, se voi estää myös, että ESP32 CAM lentää pois, tai kaatuu tuulessa.

Sen jälkeen, kun kuvaus on tehty, vien ESP kameran sisälle, pysäytän sen, joko Wifi:n kautta tai vedän pelkästään 5V johdon pois, otan SD kortin pois ja luen Sd-korttia tämän korttilukijan kautta. Se korttilukija oli minulla vielä jäljessä vanhan pikselikameran takia. Mutta kaapeli oli erikoinen, kapealla USB mini-A liittimellä.
Tämä ohje nyt on vähän niin kuin itseäni varten.<br />
Muista:<br />
<br />
Kännykän Wifi pitää olla päällä. Settings -> Wireless and Networks -> tethering and portable hotspot-> Portable Wifi hotspot
<br />
Tietokone pitää olla yhdistettynä kännykän Wifissa Ctrl +X -> Wifi -> show available networks -> Connect
<br />
Toimii vain Firefox:in selaimen kanssa osoite http://192.168.43.209/<br />
(siis ei https)<br />
Käynnistää Arduino- ohjelma. Ohjelmassa pitää olla myös Wifi:n ssid ja salasana oikein.
<br />
Lataa Timelapse ohjelma
<br />
Kytkee ESP32CAM USB kaapelilla tietokoneeseen. Laite ei rikkoo, vaikka olisi samanaikaisesti virtalähteessä kiinni.
<br />
Tarkistaa Port COM3 tai COM7
<br />
Tools-> kaikki asetukset oikein päin.
<br />
Ainakin
<br />
Wifi101/WiFiNINA Firmaware updater
<br />
Board ESP32 Wrover module
<br />
Upload speed 115200
<br />
Flashmode QIO
<br />
Partition scheme Huge APP (3MBNo OTA /1MB
<br />
Core debug Level .None
<br />
Programmer AVR ISP
<br />
Paina upload Arduino- ohjelmassa.
<br />
Pitää rst ja flash nupit alhaalla. Silloin kun upload starttaa, siis kun ....----....---- tulee esille ohjelman komenttiruudulle, päästää rst nuppi. Sitten ledien pitäisi mennä päälle.
<br />
Tätä harvoin mene ensi kerralla. Vasta kun LED:it menee päällee, asiat alkaa olla kunnossa.
<br />
Siinä vaiheessa vaihdan COM 7 ja COM 3 välissä. Kumma kyllä, ohjelma näyttää aina ESP32 Wover Module on COM7 tai COM3. Nyt kun tätä kirjoitan, se oli COM7.
<br />
Avaan vielä serial monitor:in. ja painan resettiä. Tämän yhteydessä pitäisi myös tulla SD kortin koko esille.
<br />
SD Card Type: SDHC<br />
SD Card Size: 32000MB<br />
<br />
Total space: 31936MB<br />
Used space: 0MB<br />
.........<br />
WiFi connected<br />
Starting web server on port: '80'<br />
Starting stream server on port: '81'<br />
Camera Ready! Use 'http://192.168.43.209' to connect<br />
<br />
Sitten vasta voidaan firefox selainta avata ja kirjoita sen osoitteen sinne.
Sitten laitan 5V ja GND johtimet kiinni ja irrotan USB kaapelin, ja kokeilen, toimiiko stream vielä.
<br />
Asetan Timelapse 3000-6000 ms.<br />
Resolution CIF (400x296) kun laitoin tarkemmin, tuli epämiellyttäviä häiriöitä kuvaan.
<br />
Kuljen tietokoneen, kännykän, ja ESP 32 Cam:illa siihen paikkaan, missä meinaan tehdä aika viive<br />
videon. Sitten asetan ESP CAM vaakasuoraksi, ja käytän still- kuva toiminnon, ja varmistan että kuva on oikein. V-flip täytyy myöskin kenties painaa. Vasta sitten painan timelapse kuva.<br />
<br />
Sen voi sitten anna pyöriä, monesti jätän sen tunniksi ulos. Kuljen tietokoneen kanssa sisälle. Wifi:n antenin säde ulottuu ehkä 10m päähään.
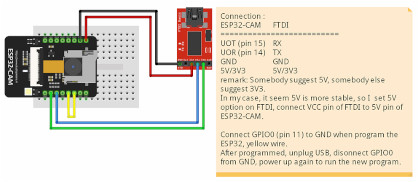
Nyt on jo toinen ESP32: siinä ei ole sisäänrakennettu ophelmointilaite, mutta ulkopuolinen laite nimeltään CP2102 USB to TTL Serial Converter Module. Siinä toimituksessa on myös Wifi antenni, ja sen ansiosta kantama on jo 15m tai ennemmän. Ohjelmointivaiheessa kaapelien pitää olla kuten kuvassa. Ohjelma siirretään Arduino IDE:stä samalla kuin ennen. Mutta sitten kun ohjelma on siirretty, pitää ensin irrottaa johdin joka yhidstää GPIO0 ja GND. Sen jälkeen painan reset, ja sitten saan luettua Arduino:n serial monitorista laitteen osoitteen, joka on http://192.168.43.40. Sen jälkeen voin myös ottaa RX ja TX jodot pois. Laite tarvitseen ainoastaan 5V ja GND toimiaakseen. Ensin laitan Kännykkästä Settings- Tethering & portable hotspot - Portable Wifi hotspot - ... päällä. Sitten laitan Kännykän Nettiselaimessa ensin siinä oikealla ylänurkalla "New incognito tab" päällä. Sitten Selaimen osoitekentällä sen laitteen osoitteen. Jos laitteessa on virta päällä, pitäisi jo tulla kamera kuva. Jos ei, painan vielä reset- nappia. Ja sitten voin käynnistää kännykältä aikaviive- sarjan. Näin pitäisi onnistua.
Kun asennan ESP32 ohjelmointi varten, pitää mennä Arduino IDE Tools manage Library, ja siinä pitäisi löytää bitluni ESP32Lib

File- Preferences
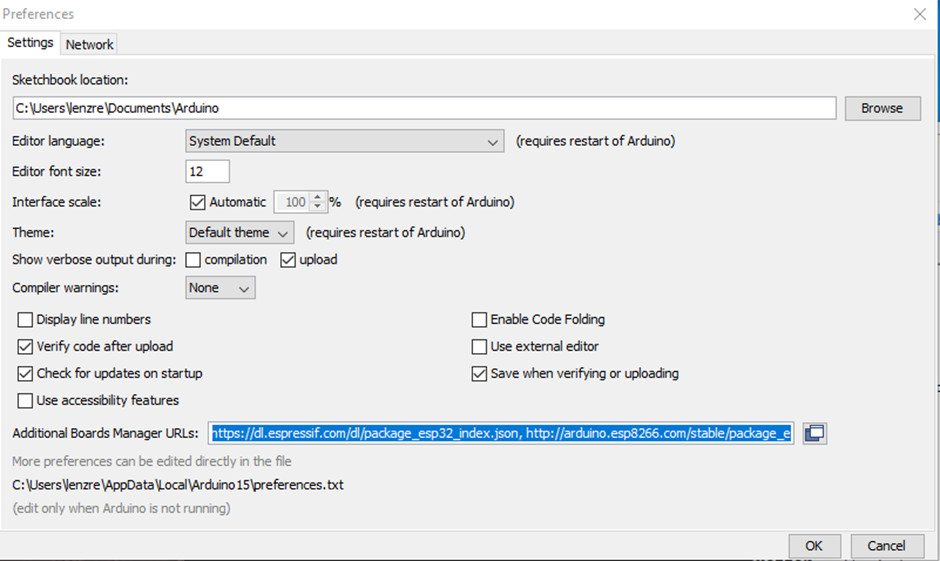
https://dl.espressif.com/dl/package_esp32_index.json/
http://arduino.esp8266.com/stable/package_esp8266com_index.json/
Upload speed 115200
Flashmode QIO
Partition scheme Huge APP (3MBNo OTA /1MB
Core debug Level .None
Programmer AVR ISP r this, I will be able to select in tools Board Board ESP32 Wrover module
]]>