Alkumaininta: Huhtikuuhun 2026 mennessä olin valmistelemassa uudempaa versiota tästä kompassivyöstä. Kompassivyön perusperiaatetta ei ole muutettu, mutta moottorit saavat virtansa suoraan paristosta, joten mikroprosessorin ei ylikuormittuu suurista virroista. Mikroprosessori on korvattu pienemmällä mallilla ja moottorien lukumäärä on vain 16. Linkkki tähän uudempaan versioon löytyy alhaalta tai https://github.com/ReinhardLenz/compass-belt-seeeduino-XIAO. Tämä vanhempi versio on kuitenkin edelleen toimiva, ja se on kuvattu tässä artikkelissa, joten päätin julkaista sen sellaisenaan. Tässä kuvattu kompassivyö toimii myös hyvin (suurin haittapuoli on isompi laatikko), joten jätän tekstin sellaisenaan, mutta en päivitä sitä enää ja pidän molemmat versiot erillisinä. Tässä tekstissä on hyviä kuvauksia rakennusprosessista, joita en toista uudessa projektissa, joten mielestäni on hyvä pitää tämä teksti sellaisenaan.

Monien muuttavien eläinten, kuten lintujen ja kalojen, sanotaan tietävän kompassisuunnat muuttaessaan, joskus hyvin pitkiä matkoja, yöllä tai päivällä, ja usein hyvin huonossa säässä.
Ihmisille tällainen tieto voi olla tarpeen esimerkiksi marjoja poimittaessa vieraalla paikalla tai yksinkertaisesti suunnan menettäessä.
Kompassivyö on vyö, joka auttaa tietämään missä pohjoinen on katsomatta kompassia. Sen ympärillä on pieniä värähtelymoottoreita ja anturi, joka havaitsee maan magneettikentän. Kun käyttää sitä, pohjoiseen päin oleva moottori värähtelee kevyesti, mikä antaa suunnistajalle ”intuitiivisen” suuntavaiston.
Miksi tämä on siistiä? Kuvittele, että olet metsässä poimimassa sieniä iltahämärässä ja kadotat suunnan. Tämän vyön avulla tunnet aina pohjoisnavan ”kutinaa”, joka auttaa sinua pysymään perillä paikastasi ilman karttoja tai kompasseja.
Tilasin elektroniset osat verkosta noin 60 eurolla.
Sitten ompelin ja juotin värähtelymoottorit venyvään kangasvyöhön.
Lisäsin muovisen soljen ja käytin polkupyörän sisäkumia sen suojaamiseen.
Koska olen suunnistusurheilun harrastaja, jolla on perustiedot elektroniikasta, pidin tätä projektia sekä hauskana että hyödyllisenä. Tutkiipa sitten uusia polkuja tai rakastaa vain hienoja vempaimia, Kompassivyö voi olla loistava kumppani!
Suunnan säätö
Säätönuppi suunnan säätämiseen 0... 360 astetta
Tärinätilat
Vaihda jatkuvan tai jaksottaisen tärinän välillä kaksoisnapsauttamalla. Kertaklikkauksella voi vaihtaa 1, 2, 3 tai 4 sekunnin välein. Pitkä painallus testaa nopeasti, että kaikki vibraattorit toimivat.
Älykkäämpi anturi
itsekalibroitava magnetometri, joka tunnistaa samalla, käveletkö, pyöräiletkö vai seisotko paikallasi.
Paristokäyttöinen tuntikausia kestävään suunnistukseen.
2 paristoa antaa noin 3 tunnin käyttöajan.
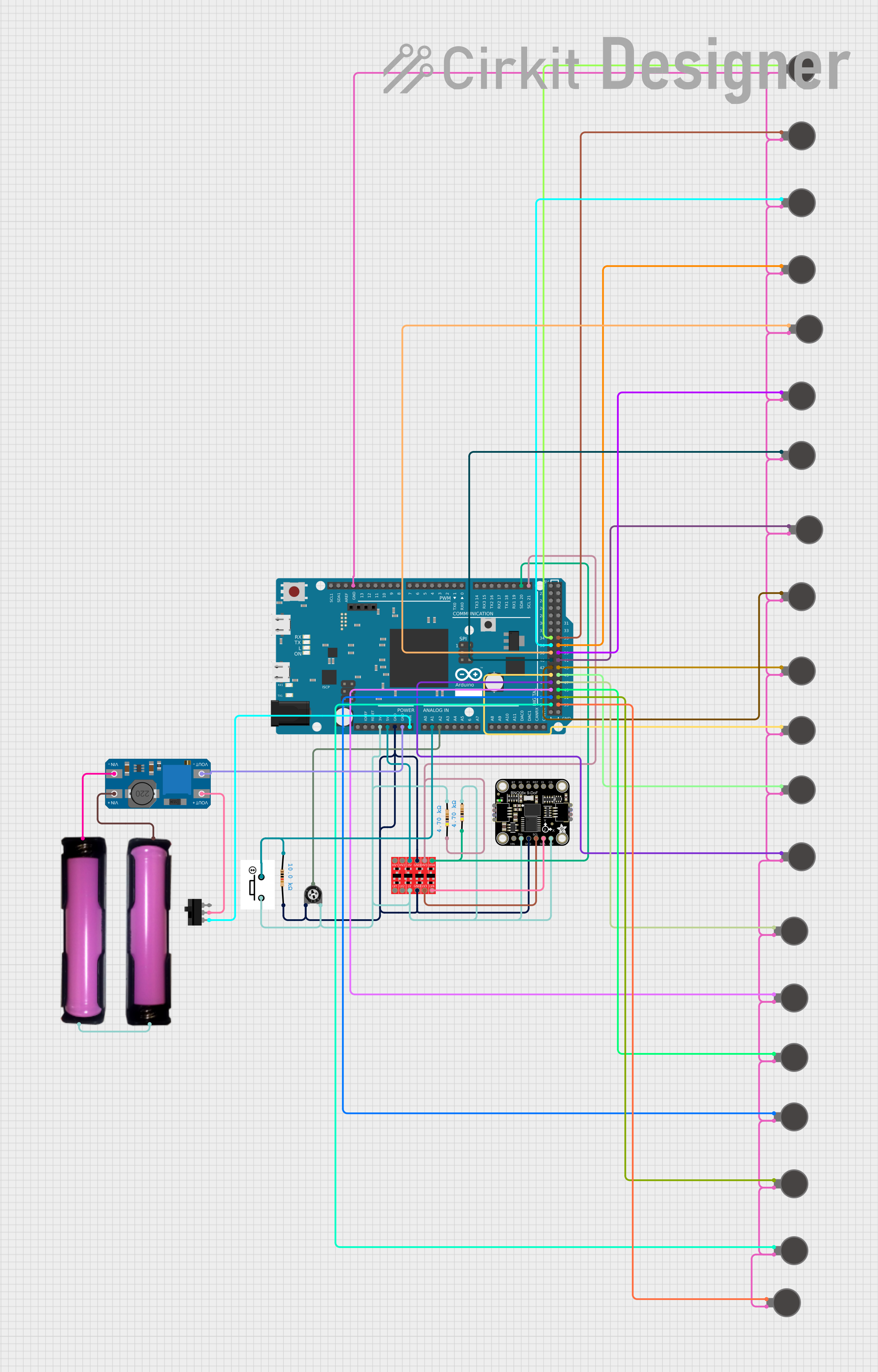
Tämä piiri on suunniteltu liittämään Arduino Mega 2560 tai Arduino Due eri komponentteihin, mukaan lukien kaksisuuntainen logiikkatasomuunnin, trimmeripotentiometrin, 20 kpl värähtelymoottoreita, Adafruit BNO085 9-DOF Orientation IMU Fusion ja muita komponentteja. Piiri saa virran kahdesta 18650 paristoista ja sisältää virtakytkimen. Arduino Mega 2560 tai Arduino Due on ohjelmoitu ohjaamaan tärinämoottoreita inertiaalikompassin (yhdistelmää kiihtyvyysantureita, gyroskooppeja ja magnetometriä) ja potentiometrin antamien tietojen perusteella, jolloin se antaa tärinäpalautetta pohjoissuunnasta.
Atmel SAM3X8E ARM Cortex-M3 -prosessoriin perustuva mikrokontrolleri.
Sisältää useita I/O-nastoja, PWM-lähtöjä ja tiedonsiirtoliitäntöjä.
Käytetään turvalliseen liitäntään eri jännitetasojen, kuten 3,3 V ja 5 V, välillä.
Muuttuva vastus, jonka perusvastus on 10 kΩ, käytetään jännitetasojen säätämiseen.
Kaksi 4,7 kΩ:n vastusta ja yksi 10 kΩ:n vastus, joita käytetään virranrajoitukseen ja I2C-väylän pull-up-vastuksina.
Useita pieniä moottoreita, joita käytetään tärinän tuottamiseen.
Anturimoduuli, joka tuottaa suuntatietoja käyttämällä yhdistelmää kiihtyvyysanturia, gyroskooppia ja magnetometriä.
Tarjoaa virtaa piirille.
Käytetään piirin virransyötön ohjaamiseen.
Käytetään käyttäjän syöttöihin piirin toiminnan ohjaamiseksi.
DC-DC-jännitteen korotusmuuntaja, jota käytetään akun jännitteen nostamiseen.
A2: Liitetty trimmeripotentiometrin liukukoskettimeen.
A1: Liitetty vastuksen (10 kΩ) nastaan 1 ja painonapin nastaan 2.
D20/SDA3: Liitetty kaksisuuntaisen logiikkatason muuntimen HV4:ään.
D21/SCL3: Liitetty kaksisuuntaisen logiikkatason muuntimen HV3:een.
5V: Kytketty kaksisuuntaisen logiikkatason muuntimen HV- napaan.
GND: Kytketty kaksisuuntaisen logiikkatason muuntimen, vastuksen (10 kΩ), trimmeripotentiometrin, Adafruit BNO085:n, Boost-moduulin MT3608:n ja tärinämoottoreiden GND:hen.
VIN: Kytketty kytkimen L1:een.
D24–D43: Kytketty eri tärinämoottoreiden positiivisiin napoihin.
GND: Kytketty Arduino Mega 2560:n tai Arduino Due:n ja muiden komponenttien GND:hen.
HV: Kytketty Arduino Mega 2560:n tai Arduino Due:n 5 V:hen.
HV3: Liitetty vastuksen (4,7 kΩ) pin1:een ja Arduino Mega 2560:n tai Arduino Due:n D21/SCL3:een.
HV4: Liitetty vastuksen (4,7 kΩ) pin1:een ja Arduino Mega 2560:n tai Arduino Due:n D20/SDA3:een.
LV: Liitetty vastuksen (4,7 kΩ) nastaan 2 ja trimmeripotentiometrin jalkaan 2.
LV3: Liitetty Adafruit BNO085:n SCL:ään.
LV4: Liitetty Adafruit BNO085:n SDA:han.
Wiper: Liitetty Arduino Mega 2560:n tai Arduino Due:n A2-nastaan.
Jalka 1: Liitetty kaksisuuntaisen logiikkatason muuntimen GND-nastaan.
Jalka 2: Liitetty kaksisuuntaisen logiikkatason muuntimen LV-nastaan.
10 kOhm: Nasta 1 kytketty Arduino Mega 2560:n tai Arduino Due:n A1:een, nasta 2 kytketty GND:hen.
4,7 kOhm: Nasta 1 kytketty kaksisuuntaisen logiikkatason muuntimen HV3:een ja HV4:ään, nasta 2 kytketty kaksisuuntaisen logiikkatason muuntimen LV:hen.
Positiiviset navat: kytketty Arduino Mega 2560:n tai Arduino Due:n D24–D43-liittimiin.
Negatiiviset navat: yhdessä kytketty Arduino Mega 2560:n tai Arduino Due:n GND-liittimeen.
3,3 V: kytketty kaksisuuntaisen logiikkatason muuntimen LV-liittimeen.
GND: Liitetty Arduino Mega 2560:n tai Arduino Due:n GND:hen.
SCL: Liitetty kaksisuuntaisen logiikkatason muuntimen LV3:een.
SDA: Liitetty kaksisuuntaisen logiikkatason muuntimen LV4:ään.
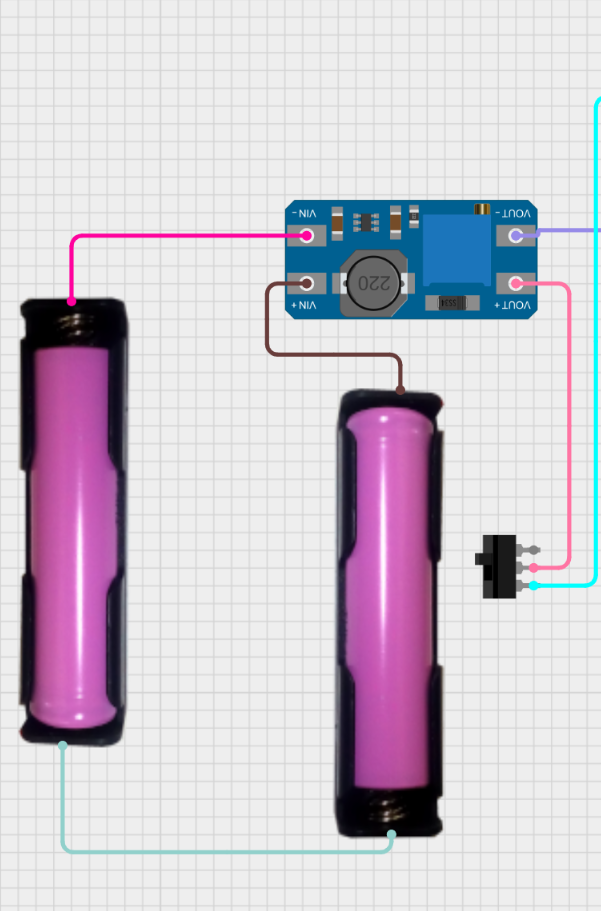
kytketty sarjaan, ensimmäisen (+) napa on kytketty toisen (-) napaan
ensimmäisen 18650 (-) napa kytketty MT3608:n (-) VIN-liitäntään.
Toisen (+) napa: kytketty MT3608:n VIN+liitäntään.
L1: kytketty Arduino Mega 2560:n tai Arduino Due:n VIN-liitäntään.
COM: kytketty MT3608:n VOUT+ liitäntään.
VIN-: Kytketty ensimmäisen 18650 akun (-) napaan.
VIN+: Kytketty toisen 18650-akun (+)napaan.
VOUT-: Kytketty Arduino Mega 2560:n tai Arduino Due:n GND:hen.
VOUT+: Kytketty kytkimen COM:iin.
Pin1: Liitetty kaksisuuntaisen logiikkatason muuntimen LV:hen.
Pin2: Liitetty Arduino Mega 2560:n tai Arduino Due:n A1:een ja liitetty 10 k Ohms -vastuksen pin1:een.
Arduino Mega 2560 tai Arduino Due on ohjelmoitu käyttämällä ohjelmaa, joka sisältää useita kirjastoja tärinämoottorivyön, kompassi-anturin ja painikkeiden syötteiden käsittelyyn. Koodi alustaa IMU-anturin ja asettaa värähtelymoottorit. Pääsilmukka lukee painikkeiden tilat ja päivittää kompassin suunnan anturitietojen tai sarjasyötteen perusteella. Tärinämoottorivyön moottoreita käynnistetään kompassi suunnan perusteella.
Github KompassivyöKirjastot: Sisältää mukautetut kirjastot tärinämoottori vyön ja kompassin käsittelyyn sekä vakiokirjastot OneButton.h painikkeiden napsautuksia varten, Wire.h I2C-viestintää varten ja Adafruit_BNO08x.h BNO08x-anturia varten.
Nastojen konfigurointi: Määrittää I/O nastat painikkeille ja värähtelymoottoreille.
Anturin alustaminen: Alustaa BNO08x-anturin ja asettaa halutut raportit.
Pääsilmukka: Lukee jatkuvasti painikkeiden tiloja, päivittää kompassin suunnan ja ohjaa kehokompassin tärinämoottoreita suunnan perusteella.
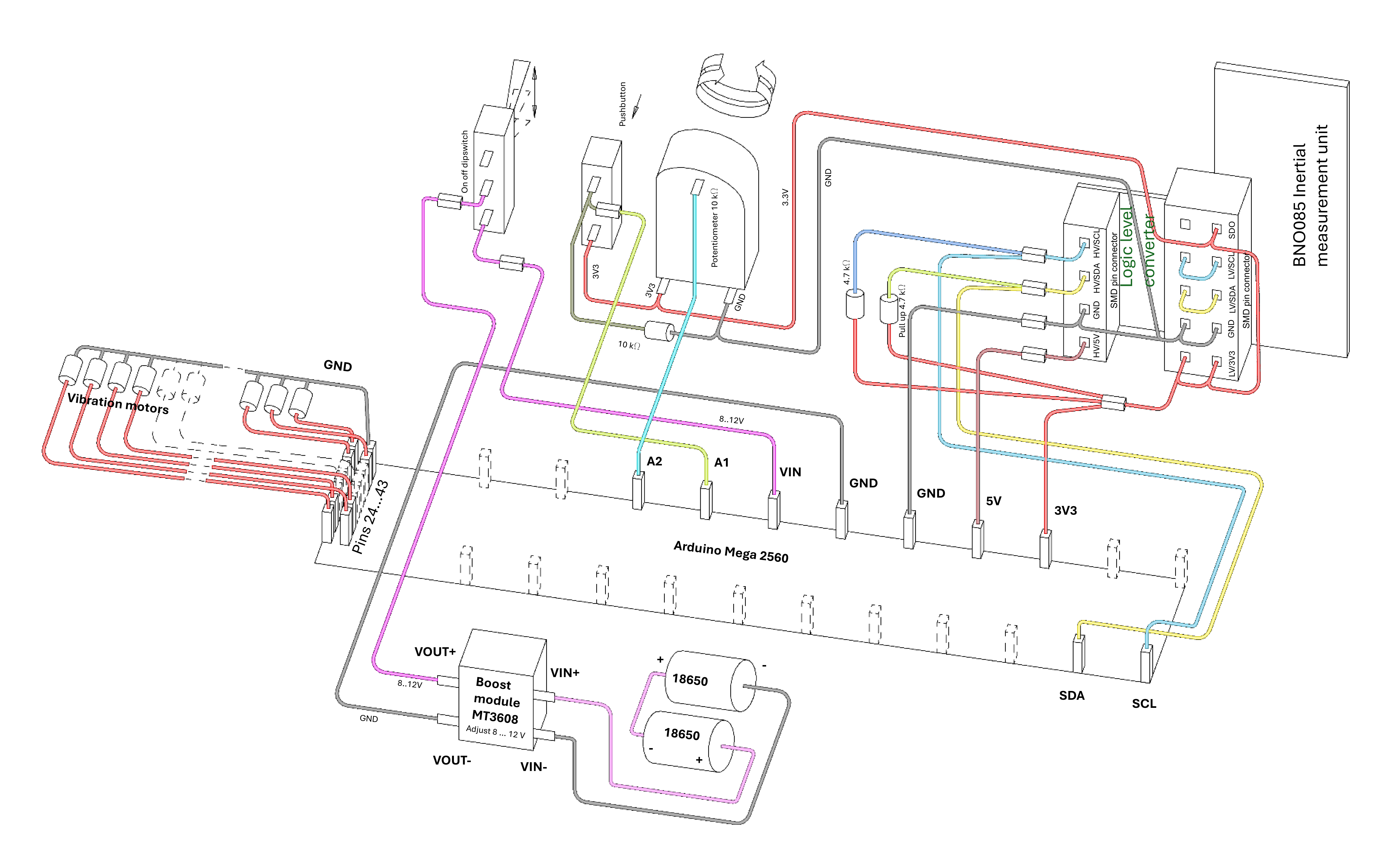
Zoomaus olennaisiin osiin pääkaaviossa
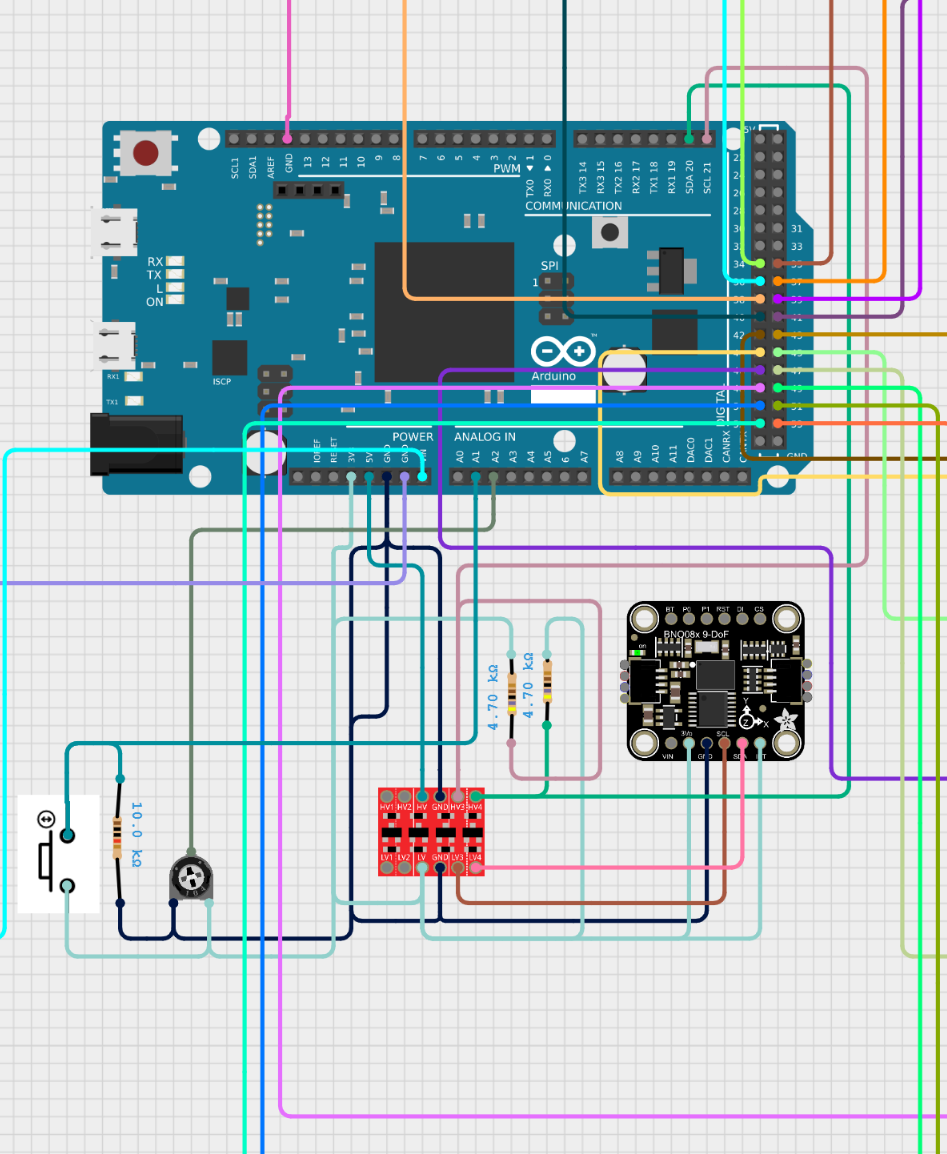
Zoomaus pääkaavion boost-muunninosaan
kaaviokuva piiristä. Kuvassa Adafruit BNO08x, mutta minulla todellisuudesssa BNO085 slimeVR. Liitinnastat ovat kuitenkin sama. Voisi käyttää suojausdiodeja (freewheeling tai flyback) poistamaan induktiivisen kuorman äkillinen jännitepiikkin, kun syöttövirta keskeytyy. Tosiaan tässä virtapiikki on ilmeisesti riittävän pieni, Arduino ei ole vielä rikkonut vaikkei ole dioodeja.
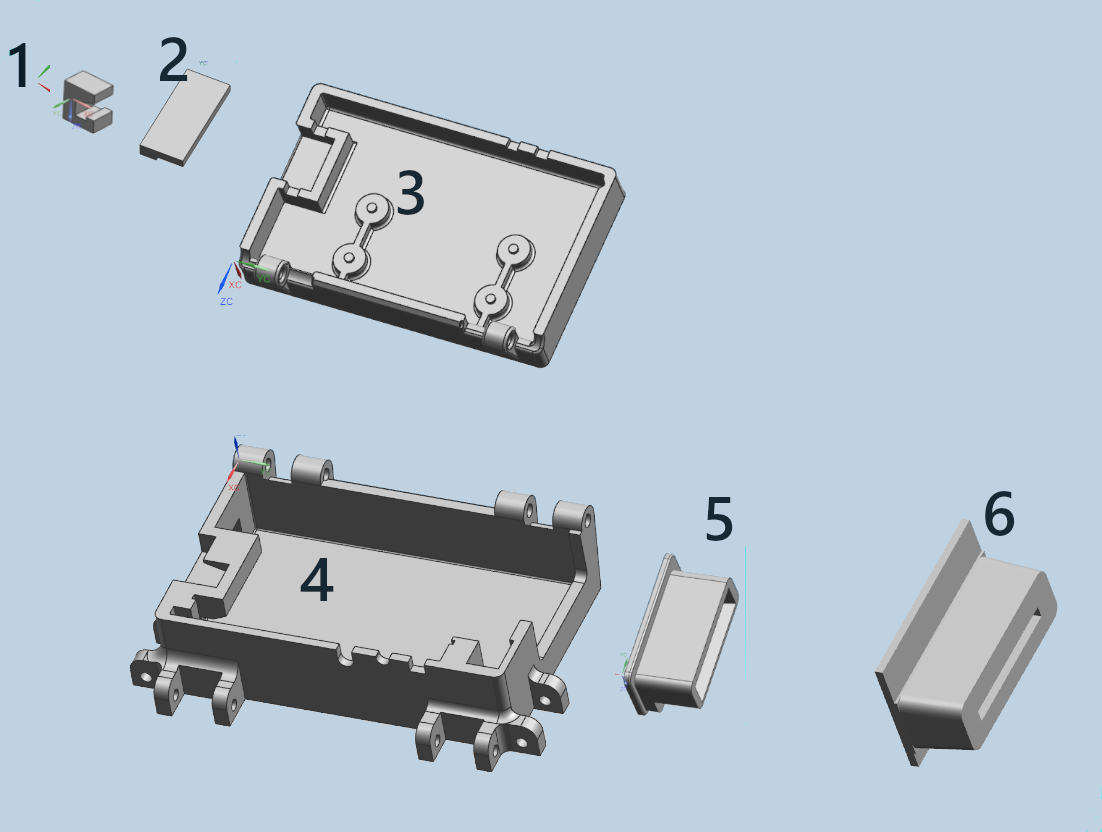
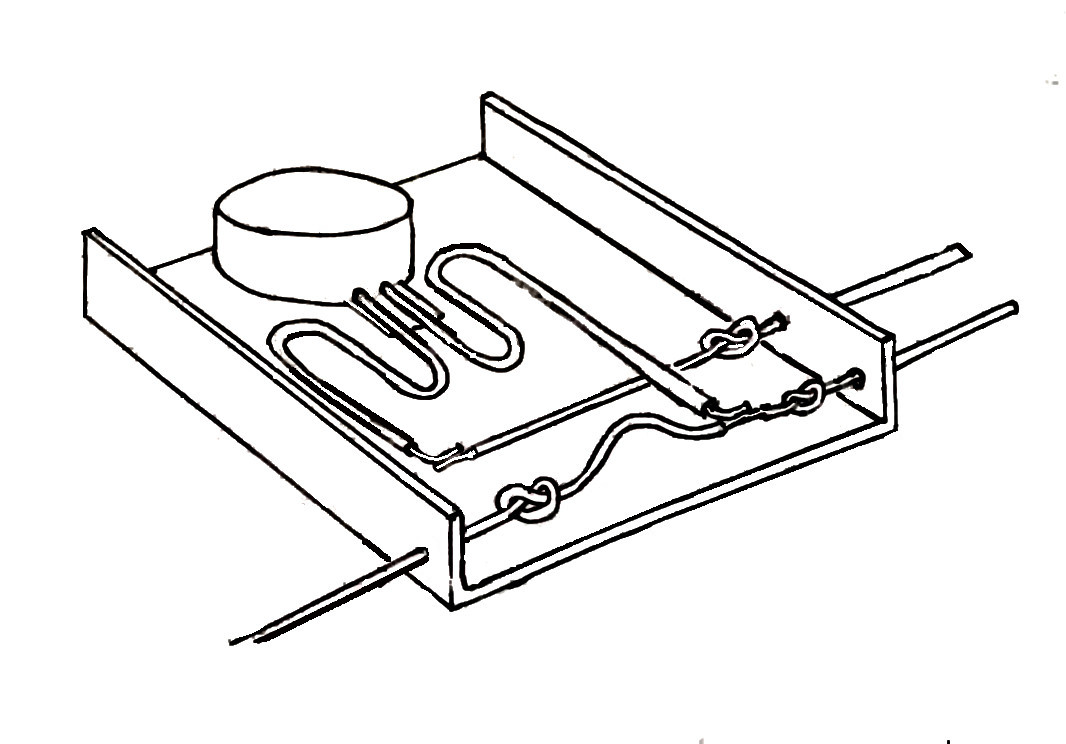
Kotelo koostuu kuudesta eri osasta: 1: liukukanne suljin. 2: ulkoneva osa uran sulkemiseksi. 3: Yläkotelo. 4: alakotelo. 5: sisempi kaapeliläpivienti. 6: ulompi kaapeliläpivienti.
Liukusuljin (1) on suunniteltu pidikkeen tavoin. Se voi liikkua edestakaisin urassa. Urassa on kohta, jossa kotelo voidaan avata. Jos suljin kuitenkin työnnetään niin, että pidikkeen muotoinen suljin tarttuu kielekkeen ympärille, koteloa ei voi enää avata. Ura on luotu liimaamalla osa (2) kotelon (3) yläosaan. Liimaamisen yhteydessä suljin (1) on kuitenkin oltava jo urassa, koska liukukappaletta ei voi asettaa paikalleen sen jälkeen, kun osa (2) on liimattu paikalleen. Tämän ansiosta suljin ei voi kadota. Kotelon (3) yläosa on liitetty kotelon alaosaan kahden saranan avulla. Käytin tähän 4 mm:n hitsauslankaa. Kaapeliläpivienti koostuu kahdesta osasta (5) ja (6). Pienempi laippa (5) työnnetään suurempaan laippaan (6), mutta ensin täytetään rako liimakittillä. Kitti puristaa litteän kaapelin yhteen ja muodostaa hyvän tiivisteen. Se myös estää pistokkeita irtoamasta pistorasiasta, kun litteään kaapeliin kohdistuu jännitystä.
Kotelossa on neljä kiinnityspistettä joustaville hihnoille, kaksi sivussa ja kaksi päällä. Paras paikka kotelolle on rinta. Kun kotelo on rinnalla, on myös erittäin helppo käyttää potentiometriä suunnan säätämiseen, kytkintä ja painiketta. Kokemukseni mukaan ei riitä, että laatikkoa on pelkästään vyön varalla juoksun aikana, vaan täytyy olla myös joustavia henkseleitä, joilla laatikko kiinnitetään olkapäiden ympärille. Nämä henkselit pujotetaan pystysuoriin kiinnikkeisiin. Nämä henkselit estävät laatikkoa liukumasta alas juoksun aikana.
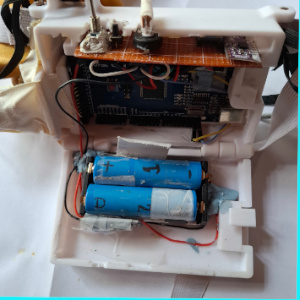
tässä kuvassa näkee 3D tulostettu kotelo avattuna edestä. Keskellä Arduino, vasempana tärinämoottoreille menevät liittimet. Vasemmalla ylänurkalla näkee kun suurentaa, että maadoitus johdolle on tehty pieni mutka johdonpätkällä, koska GND liitin on liitinrivissä erillään. Oikealla ylhäällä näkee BNO085 slimeVR IMU anturi. Sininen johto on SCL (Clock) johto, keltainen johto on SDA (Data) johto, johtojen värit ovat erilaiset kuin kaaviokuvassa. Alhaalla keskellä näkee paristokotelo, ja ylhäällä näkee juotettu kytkinlevy. Arduinon johdot ovat kaikki Dupont-liittimellä kiinni, niin että kaikki sähköä voidaan myös ottaa kokonaan irti. Johdot ovat liimattuja sinitarralla reunoihin kiinni, niin että kaikki tavarat voidaan myös tilapäisesti ottaa kotelosta pois. Anturin pitää olla aina suunnilleen vaakasuorassa, jotta se antaisi oikean ilmansuunnan.
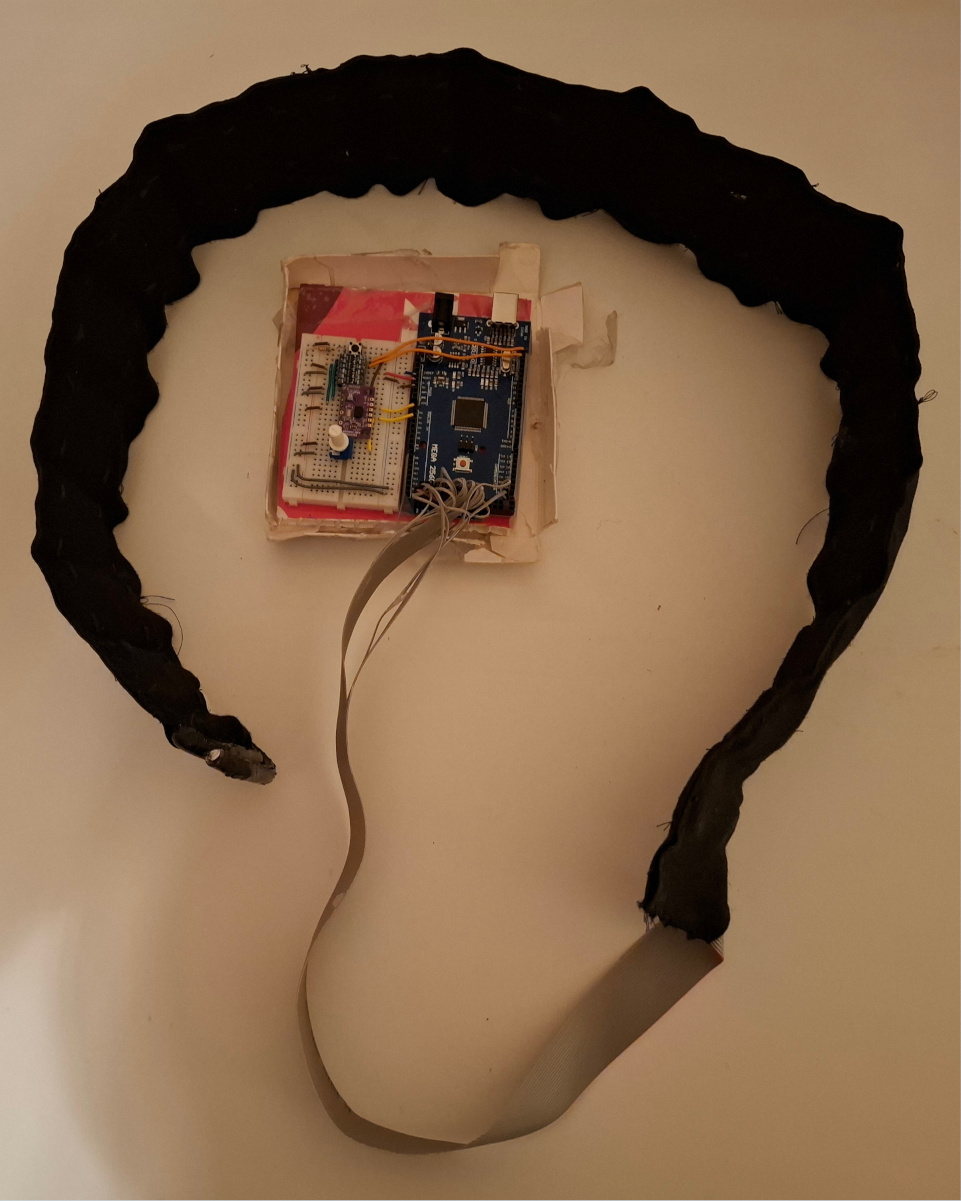
Tässä näkee kompassivyö kokonaisuudessa, edessä elektroniikka-kotelo, vasemmalta lähtee nauhakaapeli pois tärinämoottorivyölle, joka on suojattu keltaisella kankaalla. Itse kotelon laitan omalla venyvällä tekstiilinauhalla vatsan ympäri, tai vaihtoehtoisesti sitä voidaan sitten myös laittaa housun taskuun. Kotelon ja varsinaisen vyön välissä on noin 30cm lenkki, niin että kotelo mahtuu periaatteessa myös housun taskuun, vyölaukkuun tai vaikka reppuun. Tässä kotelossa on kaksi kuminauhakiinnitystä, yksi vaaka-asentoon, ja toinen pystyasentoon. Minusta vaaka-asento on juostaessa parempi vaihtoehto, silloin kotelo lonksuu vähemmän. Alussa kokeilin kiinnittää kotelon suoraan tärinämoottorivyöhön, mutta se vie siellä liian paljon tilaa, ja ne kotelon alla olevat tärinämoottoreiden tärinä vääristyy, ja se hankaus kotelon ja moottoreiden välissä voisi kenties repiä liittimet ja johdot rikki.
Tässä vyön keltaisella tekokuitukangaspällystysellä. Tämä kangas on ohut ja sileäpintainen, niin että kuivaa nopeasti, ja sen voi myös ottaa pois jos haluaa laittaa sitä pesukoneelle. Suunnistus on hikinen ja kroppa on jatkuvasti kosketuksessa märkien ja likaisten oksien ja risujen kanssa. Kangas ei saa olla huopamaista, missä pienet kuidunpäät työntyvät ulos kankaasta jotka toimivat kuin pienet koukut, joilla ne kiinnittyvät esineiden pieniin halkeamiin, piilotetuihin kaapeleleihin ja pieniin pistokkeisiin, jolloin kaapeliin tulisi pikkusolmuja tai pistoke jää kiinni kankaan nukkaan. Sähkökotelo on oltava omalla venyvällä tekstiilinauhalla kiinni. Molemmat vyöt ovat tässä mukavan tiukasti kiinni kropassa, niin että kokonaisuus toimii myös suunnistuskilpailussa. Kaapeli pätkä kotelon ja vyön välissä on nyt turhaan löysä, sen voisi lyhentää jollakin kumilenkillä. Elektroniikkakotelo ei saa lentää ympäriinsä, koska anturi, joka mittaa oman asentoon kolmiulotteisessa avaruudessa, antaisi silloin vääriä signaalia. Periaatteessa anturi kompensoi kaikki kallistukset, mutta sen pitäisi pääsääntöisesti olla vaakasuorassa asennossa.
En ole tyytyväinen yksittäisiin johtoihin arduinosta kuhunkin värähtelymoottoriin. Se aiheuttaa sotkua. Litteä kaapeliratkaisu näyttää olevan puhtaampi ratkaisu. Ihmisen vyötärö ei ole todella pyöreä, vaan enemmän kuin ellipsi, joten säädä värähtelymoottorin pisteiden välisiä etäisyyksiä. Jotta ihmiset, joilla on isompi vyötärö, voivat käyttää kompassivyötä, käytän 110 cm:n vyötärönympärystä. Asia on niin, että haluan tehdä 2 kompassivyötä, joten teen kaiken niin, että saan 2 identtisesti leikattua lattakaapelia. Kaikki on symmetristä keskipisteestä. Kaikki kaapelin päät varustan dupont-liittimillä, ja - erittäin tärkeää - testaan kaikki kaapelit, jotta voin varmistaa, että niissä ei ole vikoja ja että jokainen johto on toimiva liittimestä toiseen.
Joustava tekstiilinauha, johon on ommeltu solki, mittanauha ja lattakaapeli, joka on asetettu maahan. Merkitsen keskikohdan. Joustavan tekstiilinauhan päälle asetetaan värähtelymoottoreiden koe-”pesät”.
Soljen "naaras" osan pää. Itse asiassa solki on leveämpi kuin kahden tärinämoottorin välinen normaali etäisyys, joten siitä syntyy jonkin verran virhettä.

Lattakaapeleiden päät teipataan lattiaan, jotta lattakaapeli on suorassa. Lattakaapelissa on 26 johtoa, joten jätän 2x3 ulointa johtoa leikkaamatta. Leikkauskohta merkitään ensin huopakynällä taulukon mukaiseen leikkauspituutta. Kun kaikki merkinnät on tehty, ne on myös tarkistettava (molemmilta puolilta, sen on oltava symmetrinen).

Kun kaikki yksittäiset johdot on merkitty, viillän litteän kaapelin veitsellä merkityn kohdan ympäri. Käyn läpi kaikki merkityt kohdat.

Tämä on viimeinen vaihe. Kun viillot on tehty, jatketaan halkaisua niin, että molemmat symmetrisesti leikatut litteät kaapelit irtoavat toisistaan. Tee lopuksi leikkaukset leikkaavilla pihdeillä.

Tärinämoottorit tulevat JST-SH koiras liittimillä varustettuna. Ostan siksi siihen sopivat naaraspuoleiset liittimet. Nämä täytyy juottaa. Liitimen nastat ovat hyvin pieni.

On parempi, jos käyttää vain vähän tinaa, että johdon säikeet pysyvät mahdollisimman taipuisana. Juottokohta on hauraampi eikä kestää taittumista niin paljon.

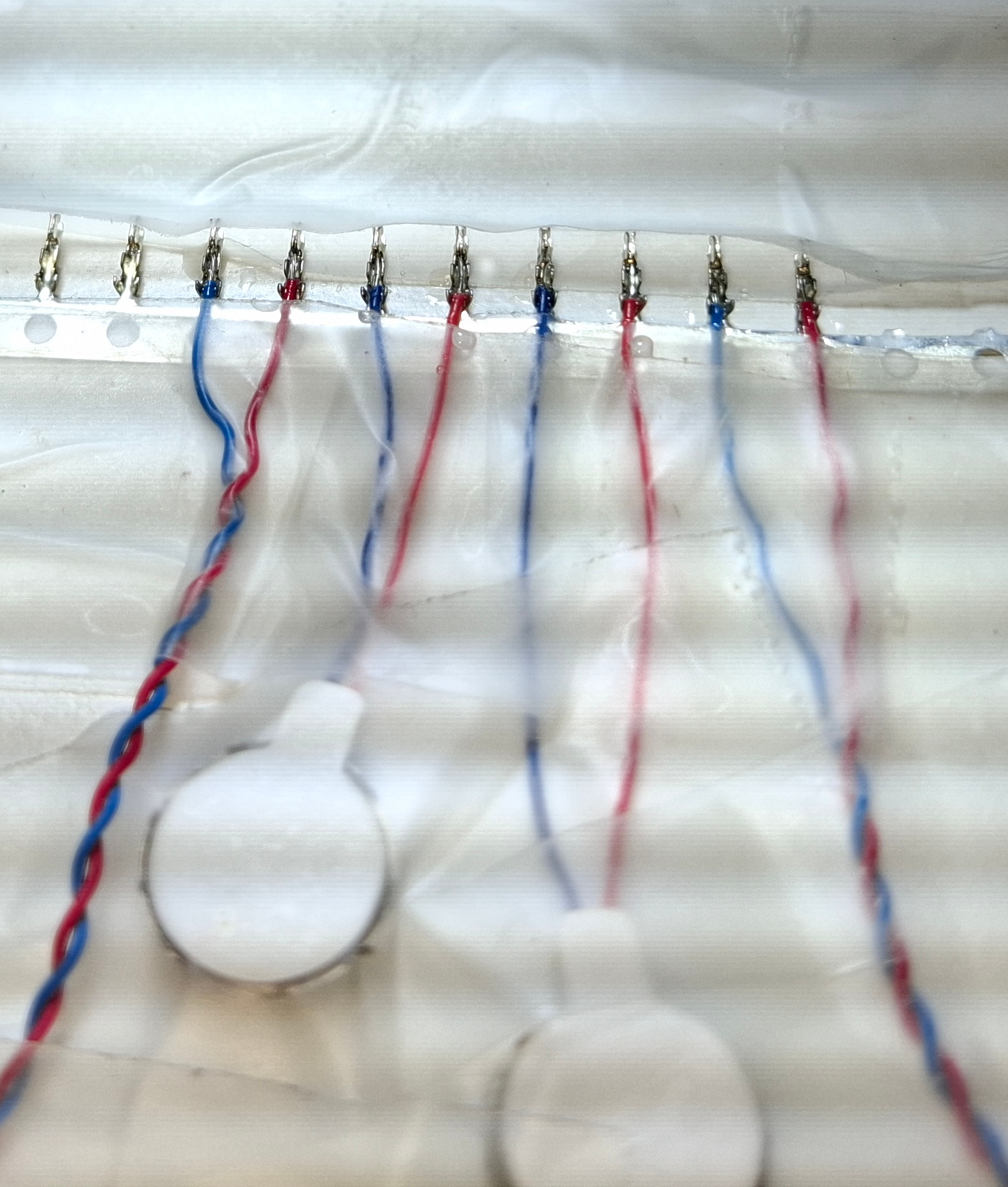
Kaavin maadoituskaapelin auki kuumalla juottokolvilla suurennuslasin alla. Kiinnitin lattakaapelin tukevasti jalustalla ja puristimilla. Työnsin metallilevyn maadoituskaapelin ja toisen kaapelin väliseen rakoon alustaksi. Sitten raavin kaapelin muovivaipan varovasti pois kuumalla juottokolvilla varoen katkaisemasta säikeitä. Työnnän juottokolvin myös säikeiden alle. Kuorin liitäntäkaapelien eristykset etukäteen. Kun juotat, purista johdot tiukasti kiinni ja juota suurennuslasin alla. Kun olet saanut ensimmäisen juotosliitoksen tehtyä oikein, seuraavat juotosliitokset ovat paljon helpompia, koska sinun tarvitsee vain siirtää kaapelia.

On selvää, että juotosliitokset katkeavat helposti, jos kaapeli jatkuvasti taittuu hieman edestakaisin, kuten kompassivyön käytössä varmasti tapahtuu. Siksi liimasin kaikki juotosliitokset lujasti epoksiliimalla (2-komponenttiliima). Kiedoin siis ensin skotch-teippiä pistokkeen ympärille muodostaakseni eräänlaisen ”kaukalon”. Ja sitten kaikki kaapelin päät pistokkeineen tukevasti pöytään teipillä, jotta mikään ei pääse liikkumaan. Sitten sekoitan epoksiliimaa ja täytän kaikki juotosliitokset epoksiliimalla.Sitten odotan että epoxi kovettuu. Seuraavana päivänä poistan teipin ja käärin eristysteipin näitten kahden johtimen ympärille.
kuvassa miten nauhakaapeli kiinnitettynä kahdella puristimella. Alhaalla teräsharja, näkyy jolla poistin sulanutta muovia juotookolvilta. Vakaan juottokolvin tukemalla toiseen taivuteltavaan hanhenkaulaan. Katson ensin suurennuslasin ohi, että juottokolvi osuu suunnilleen kohdalleen, sitten katson suurennuslasin läpi.

keltainen johto on kiinnitetty toiseen hanhenkaulaupuristimeen alhaalta. Juottokolvi tukeutuu toiseen hanhenkaulaan. Muista sivellä juottokohta juotosnesteellä. Yritän olla säästeliäs tinan kanssa, koska tinattu johto on hauras, siis kannattaa että on vaan mahdollisimman lyhyt pätkä tinattuna. Juottoavustus magneettisillä joustavilla hanhenkaulapidikkeillä nopeuttaa työn, koska tässä tavitaan ennemmän kuin kahta kättä.

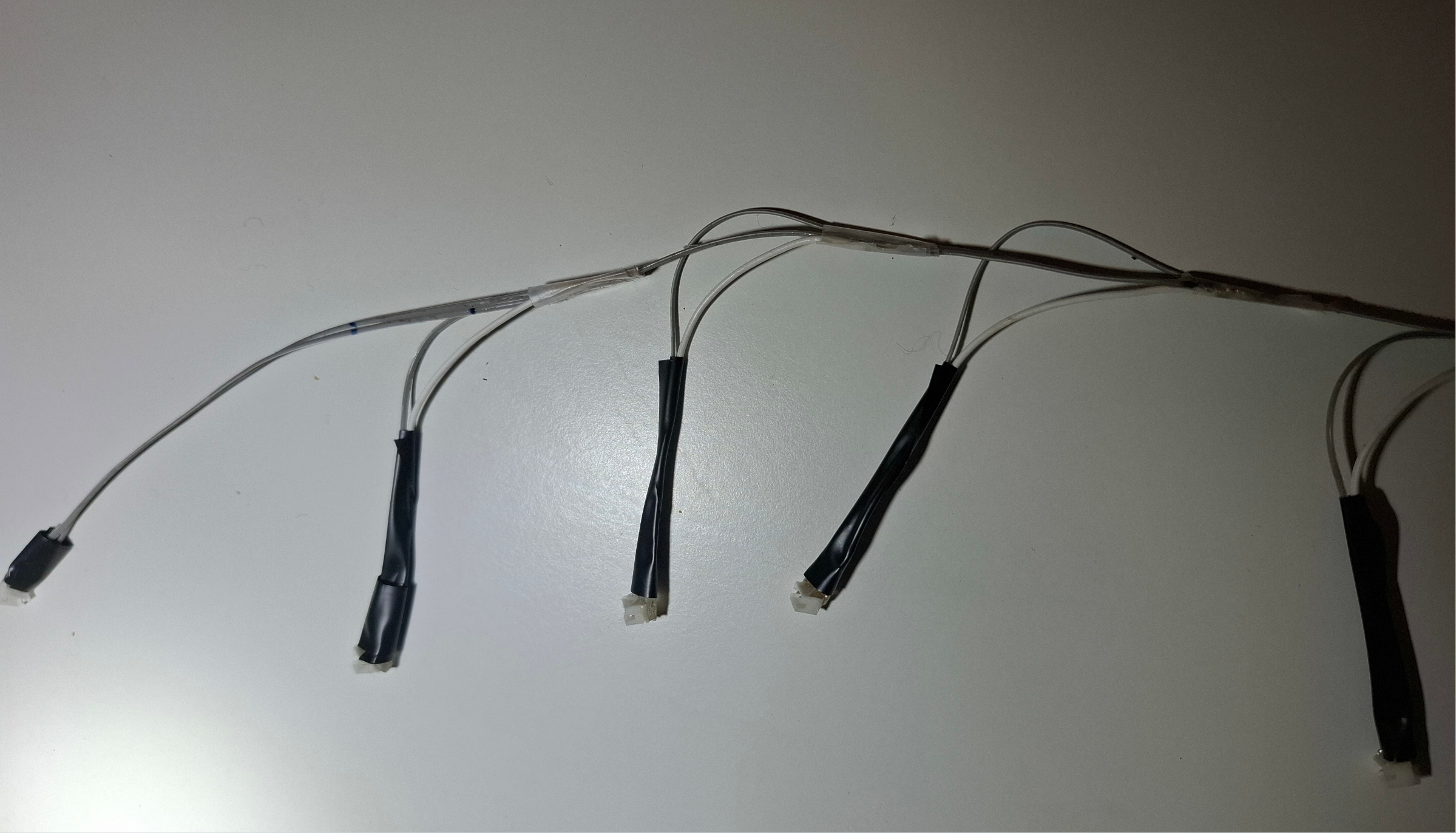
Kuvassa näkyy, miten kiedoin sähköteippi tärinämoottoreihin vieviin johtoihin ympärille, jotta ne pysyisivät siisteinä yhdessä. Tässä kohdassa vosi myös olla kutistesukka.
On tärkeää, että kutistesukka asetetaan paikalleen ENNEN liittimen juottamista. Sitten juotan kaikki liittimet, ja sitten laitan epoksiliimaa kaikkiin juotoskohtiin, ja sitten vedän kutisteputken liittimen päälle, kun epoksi on vielä märkä.

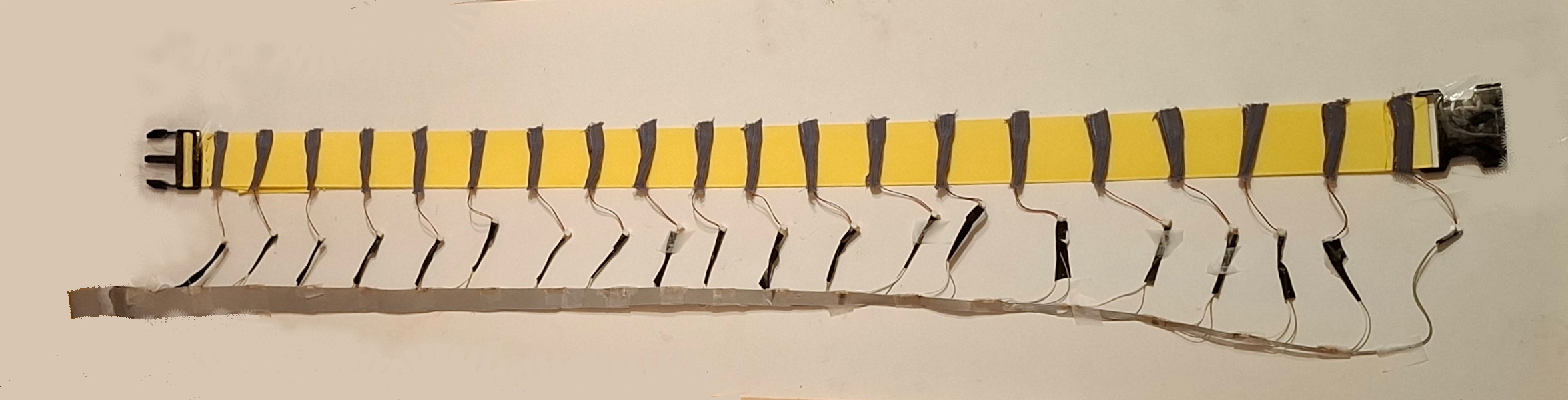
Kuvassa näkyy nauhakaapeli kokonaisuudessaan. Tässä vaiheessa on tärkeä vielä testata kaikki, että varmasti kaikki juottokohdat johtavat sähköä. Minusta tämä on paljon siistiimpi ratkaisu kuin se aikaisempi, jossa oli erillisiä johtoja, se muistutti spagettia.

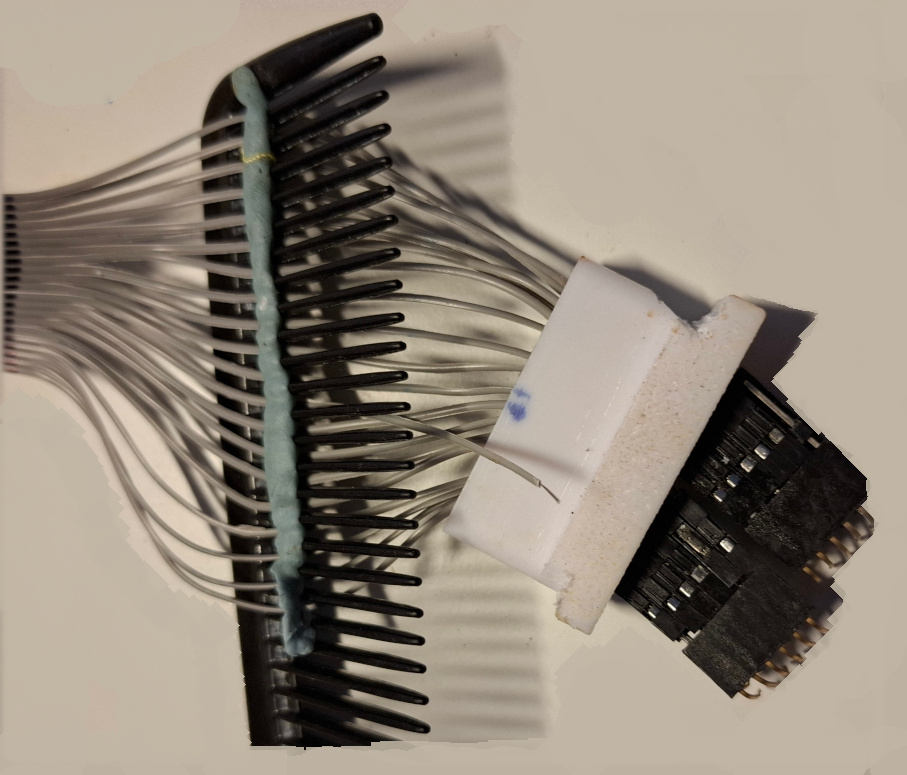
Järjestys lattakaapelin päihin kampaan avulla. Se on tärkeää, että johdot laitetaan järjestyksessä riviliitimiin. Parempi laittaa jokaisen johdon omaan kampaan piikiin. Kun laittaa Dupont liittimen yksittäiseen johdonpäähän, toisten johdonpäiden on taipumus sekoittua koko ajan. Tätä voidaan välttää kamman avulla niin kuin kuvassa. Liimamalla johdot sinitarralla tiilapäisesti kampaan piikkeihin kiinni johdot eivät karkaa. Sinitarra on muutenkin tärkeä, sen avulla voidaan pitää komponentit paikoillaan ylösalasin juottamisen aikana, ja sinitarraa voidaan käyttää nippusiteenä, koska tavalliset nippusiteet ovat aivan liian isoja tähän pieneen koteloon.
Tässä näkyy vyö putkimaisilla tärinämoottoreilla. Näyttää vähän itsemurhapommimiehen pommivyöltä, höh höh. Siinä on nyt suojaksi keltainen verkkonauha, mutta tämä suojaus ei ole tässä kuvassa vielä valmiina. Keltainen verkkonauha on nyt vain pyöreillä tarranauha pätkillä kiinni. Tarravauhan takapuoli on itse liimautuva ja se tarttuu aika herkästi kankaisiin. Tätä kirjoittaessa uskon että olisi paras vielä ostaa kangaskaupasta jotain silkkimäistä kangasta joka suojaa vyön joka puolelta.

Ostin sähköhammasharjan tärinämoottorit (mitta 7x25mm), joissa oli valmiiksi JST ZH pistokkeet. Ompelin venyvästä tekstiilinauhasta harmaanvärisen putken.tekstiiliputken halkaisija on noin 8mm ja pituus noin 50mm. Työnnän sitten tärinämoottorin tekstiiliputken sisään ja ompelen sitten vyöhön kiinni. Valitettavasti tästä työvaiheesta ei ole kunnon valokuva. Mutta idea on siitä että tärinämoottorissa ei ole mitään kiinnitys silmukka mistä sitä voidaan kiinnittää vyöhön, mutta se onnistuu tekstiiliputken avulla. Tässäkin vyössä määräsin paikat vyötäröllä tarkasti, mutta tässä on niin pitkä solki, että minun piti vähän sumplia sen vatsanympäryksen kanssa. Kun ompelin nämä putket kiinni, tein ensin solmen ompelulangan toisen päähän, mutta kun tämä on aika paljon aikaa vievää, siirsin siihen tapaan, että teen vaan muutamia pistoksia ja luotan sitten siihen, että lanka pysyy kiinni muutenkin ja tein vaan muutamia solmia pistoksien lopussa, niin että se minun mielestä oli riittävä. En ole ommelut letkujen päät kiinni, koska moottorit istuvat siinä letkussa aika tiukkana kiinni. Nämä harmaat putken pätkät ompelin päistä keltaisen vyön kiinni. Sitten työnsin tärinämoottorit niihin harmaisiin putkiin, kytkin moottorit pistokkeilla nauhakaapeliin ja testasin. Toisin kun nappimoottori-vyöllä tässä ei ollut ollenkaan ongelmia rikkinäisten liitoksien kanssa, testaus osoitti, että kaikki moottorit toimivat moitteettomasti. Minö opin tästä, että käytännössä JST-ZH liitin sopii paljon paremmin juotettavasti kuin JST-SH sen suuremman koon takia. Ei tulee enää ikinä käyttämään JST-SH:ta.
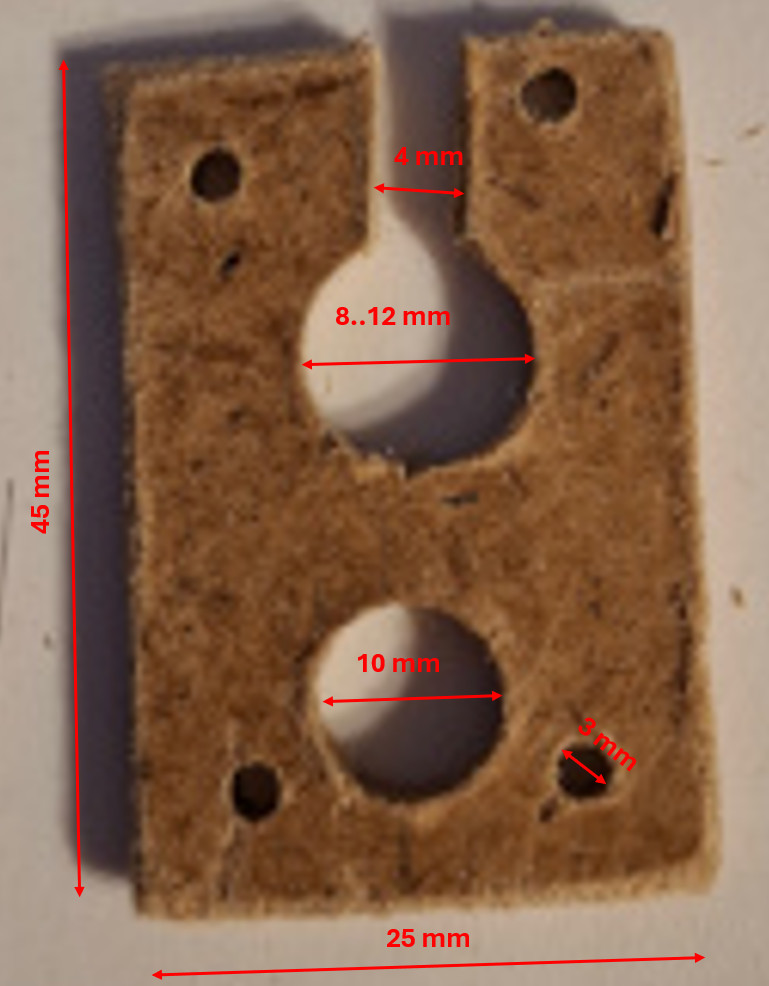
Sain 3mm paksuista lastulevyä paikalliselta puuliikkeeltä. Levyn paksuus on oltava 3mm, koska tärinämoottori on juuri sen paksuinen. Sopiva korkeus on 45mm, koska venyvän tekstiilinauhan leveys on 50mm, ja luulen että tärinämoottorikotelo voisi olla hiukan kapeampi. Poraan 4 pientä reikää halkaisijalla 3mm, jolla ompelen sitten tämän kotelon venyvään tekstiilinauhaan. Moottorille poraan yhden 10mm reijän, se istuu silloin tiiviisti reijässä. Voit porata useita laattoja samaan aikaan, ja levypinon alla on sitten 2 ylimääräistä levyä. Kun teet sen näin, alimmaisesta laatasta ei irtoa lastuja ja kaikki porausreikien viisteet ovat puhtaat ja sileät. JST-SH Pistokkeille riittää 8mm poraus. Värähtelymoottorissa on pieni kieleke, ja tätä kielekettä varten minun on viilattava pieni syvennys, jonka mitat ovat noin 2mm x 2mm x 1mm, muuten moottori ei sovi tarkasti.
Minulla ei ole JST-SH-pistokkeisiin erikoistunutta puristustyökalua. Siksi otin neuvoja tubettajalta, joka vain juotti ilman puristuslaitetta. Tässä kuvassa näkyy, miten kiinnitin pistokkeen teipillä. Tämän pienen pistokkeen kohdalla oli erittäin tärkeää käyttää vain hyvin pientä määrää tinaa juottimeen. Jos tinaa on liikaa, se täyttää myös metallisen pistokkeen tinalla, ja silloin se ei toimi. Painan metalliosan pienillä pihdeillä kasaan, niin että se sopii täsmälleen pistokkeen pieneen rakoon. Työn jälkeen se on testattava. Laitan myös pienen pisaran epoksiliimaa siihen kohtaan missä sähkökaapeli tulee ulos pistokkeesta.
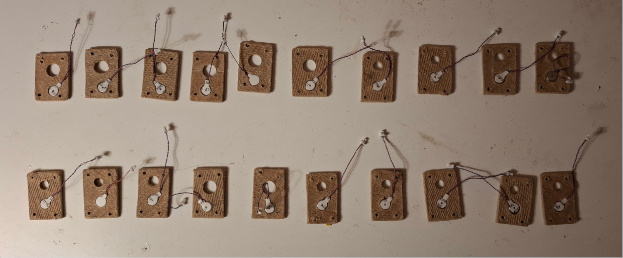
Tässä kuvassa kaikki 20 mottoripidikkeet yhdessä kuvassa.
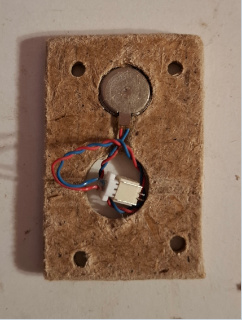
Tärinämoottorissa ei ole sellaisia reikiä joilla voisi ommella sen johonkin kiinni, sitä paitsi johdot sopii paremmin siihen, että moottori olisi kännykän kuoressa jossakin kiinni. Siksi pidin parempana tehdä sellaista pidikettä. Yläpuolinen ura yläreunan ja yläpuolisen reijän välissä tuli tarpeen, koska kutistesukan pää ei muuten oliisi menyyt pidikkeen sisään.
Tässä kuvassa näkyy, miten läpinäkyvä kutistesukka on sulatettu tärinämoottorin kotelon ympärillä, niin että se suojaa sen tiukasti joka puolelta. Lämmitin kutistesukan kynttilän avulla, ja pelkäsin vähän ettei moottori kestää kuummuuden, mutta se sietää hyvin kynttilän lämpöä, ainakin lyhyeksi ajaksi. Laitoin moottorin ympärillä vielä tavallista teippiä ihan vaan sen takia, ettei moottorista tuleva kaapeli taittuisi liian jyrkällä kulmalla. Tässä kuvassa näkyy, miten sisäänvientikaapelin musta kutistesukka on taiteltu niin "haitari" muotoon, että se voi ottaa pienet venytykset vastaan.

Ennen tärinämoottoreiden ompelua kiinni venyvään kangasvyöhön merkkasin venyvään tekstiivyöhön (B=80mm) neulalla ja teipilla kohdan, mihin kohtaan tärinämoottori kuuluu. Tässä olisi tietysti räätälin liitu parempi, mutta minulla ei ollut sellaista. Koska ompeluvaiheessa joudun koko ajan asettelemaan vyön kun ompelen neulalla ja ompelulangalla. Itse Nauhakaapeli on 160mm pitempi kuin itse vyö, että myös tukevampi suunnistaja voi laittaa sen kiinni.

Tässä valokuvassa kaikki tärinämooottorit ommeltu venyvään tekstiilinauhan. Nauhakaapeli on pitempi ja kun venyy tämän tekstiilinauhan kunnolla voimalle, se sallii vatsaympäryksen 110cm. Mutta kutistesukat eivät venyy kunnolla niin paljon kuin olisin odottanut, ne ovat aika jäykkiä. Ne tavallaan kiertää ylöspäin kun venyy kuin olisi nivelöity sen moottorikotelon ympäri, ja se ei ole ihan tarkoituksenmukaista.

Ompelin vyön alapuolen sauman koko pituudella kiinni. Yläpuolen sauman ompelin muutamista kohdista langalla kiinni, mutta löysin kaupasta pyöreitä tarranauhakiinnityksiä, joita liimasin venyvään kangasvyöhön. voin sitten helpompi avata tämän venyvän kangasvyön jos esiintyy kaapelivaurio. Ompelin vyön päät kiinni, mutta jätin ylä- ja alapuoleen pienet kolot, niin että päihin tuli silmukka ja nauhakaapeli tulee nyt alapuolen kolosta ulos. Minulla sattui olemaan kotona mustalla muovilla pinnoitettu noin 4mm alumiinilanka, pituus ehkä 30cm. Väänsin siitä alumiinilangasta paperiliittimen muotoiseksi ja punosin sen vyön silmukoihin.