Meshtastic är ett mesh-protokoll som använder LoRa-teknik. Det är särskilt utformat för vandrare, backpackers, cyklister och andra friluftsentusiaster för att hjälpa dem att hålla kontakten utan mobilnät. Meshtastic-enheter bildar ett tillfälligt, självorganiserande ad-hoc-meshnätverk där varje enhet både sänder och tar emot, vilket möjliggör kommunikation över stora områden utan centraliserad infrastruktur.
Meshtastic-enheter använder LoRa-teknik för långdistanskommunikation med låg strömförbrukning. Det gör dem mycket lämpliga för camping- och vandringsscenarier där det kanske inte finns mobiltäckning. Meshtastic-enheter kan skicka textmeddelanden, GPS-positioner och annan information mellan enheter i nätverket.
Meshtastic-enheter kan konfigureras och hanteras via en mobilapp eller ett datorprogram. Användare kan skapa sina egna nätverk, tilldela enhetsroller och skicka meddelanden mellan enheter i nätverket. Meshtastic är ett open source-projekt och communityn utvecklar kontinuerligt nya funktioner och förbättringar.
Jag har installerat Meshtastic med onlineverktyget, och jag har också installerat det via VS Code och PlatformIO.
Kompilera och ladda upp Meshtastic-koden till enheten med PlatformIO
Den slutliga versionen verkar vara den här:
https://github.com/meshtastic/firmware/releases/tag/v2.7.15.567b8ea
Metoden nedan bygger på att jag redan har installerat git och platform-io.
Windows Power Shell:
Så du behöver byta till valfri katalog där du vill skapa projektet. Katalognamnet får inte innehålla mellanslag.
cd c:\temp\platformio\
Sedan behöver du klona repot från GitHub där Meshtastic-koden finns. Adressen är:
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
git pull --recurse-submodules
Sedan öppnar jag VS Code,
Jag öppnar mappen.
c:\temp\platformio\firmware
Sedan behöver du öppna projektet i PlatformIO och därefter bara kompilera och ladda ner det till enheten.
Jag väntar tills PlatformIO känner igen enheten, och sedan kompilerar jag bara och laddar den till enheten.
Jag vet inte varför jag måste köra git add . även om jag inte har ändrat något, men utan det låter den mig inte byta branch. Så:
git add .
Sedan:
git commit -m "no changes"
Jag såg på webbplatsen att versionsnumret för den stabila versionen är följande:
stable version
v2.7.15.567b8ea
Så efter det:
git checkout v2.7.15.567b8ea
Sedan kompilerar jag bara och laddar upp den till enheten.
det fungerar tillsammans med PlatformIO, och längst ner i VS Code-fönstret finns en bock och en ->-symbol
Kompilera Meshtastic-koden och ladda ner den till din enhet med onlineverktyget
https://flasher.meshtastic.org/


Jag tog ett foto på mitt hobbybord: till höger finns en liten låda med många komponenter: transistorer, Arduinos, sensorer, lysdioder, potentiometrar, tryckknappar, kablar, chips, förstärkare, kondensatorer och andra småsaker. Bakom det finns ett spikbord med saxar, diverse tänger, förstoringsglas och pincetter som hänger så att de alltid är i ordning. På höger sida av bordet finns också en lödkolv och tillhörande material i en plåtlåda: lödvätska, rengöringssvamp för spetsar och lödplåt. Framför finns ett magnetbord med hållare som håller komponenterna som ska lödas på plats eftersom jag ibland löder. Till vänster finns en multimeter och diverse kablar, tejp och fler verktyg. Jag tycker att bra belysning också är viktigt.
Eftersom jag två gånger satte in 18650-batteriet på baksidan av laddningsenheten började jag fundera på hur jag skulle kunna förhindra detta. Jag hittade en handledning på webben, där en utveckling presenteras, med steg-för-steg-förbättringar. Adressen är:
Från detta har jag bara valt ut den sista skyddskretsen:
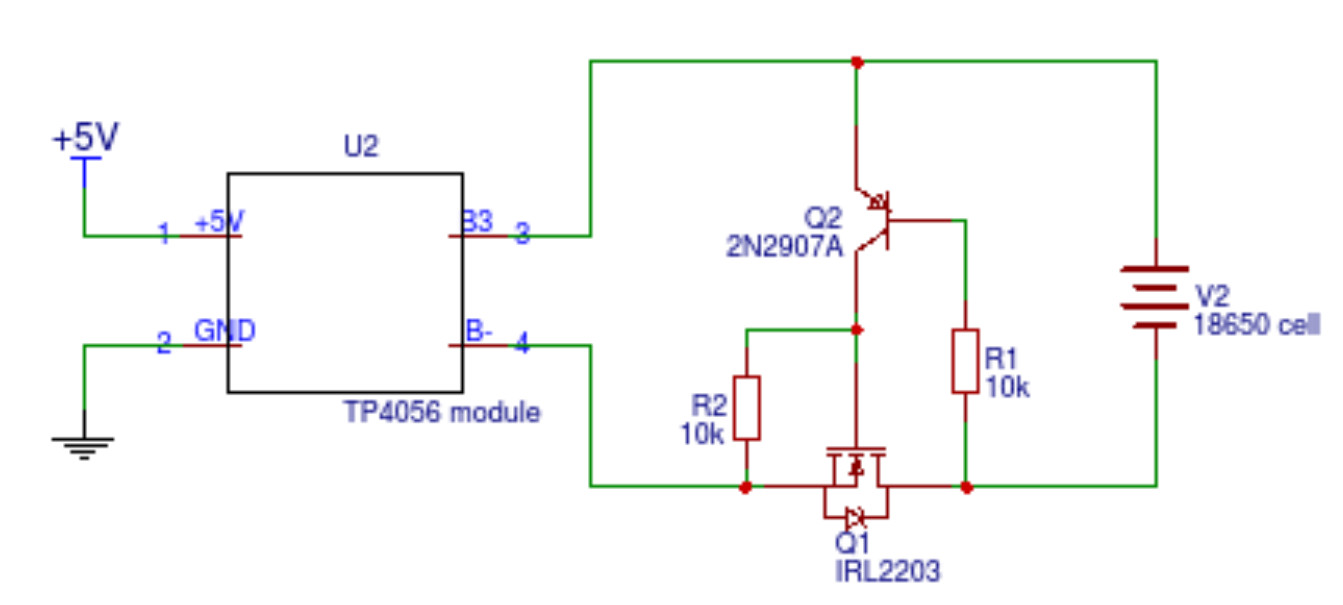
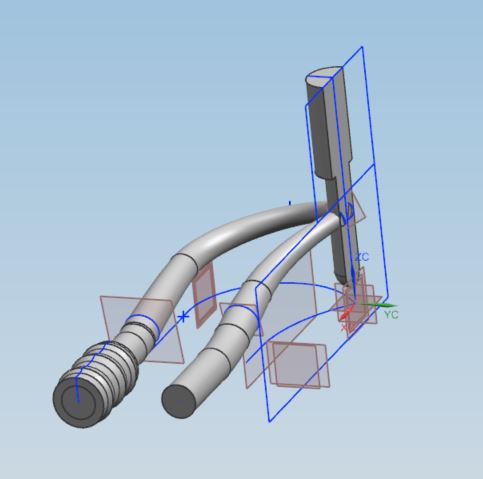
Jag gjorde en isometrisk bild av detta, eftersom jag inte har någon aning om placeringen av MOSFET-transistorns stift.
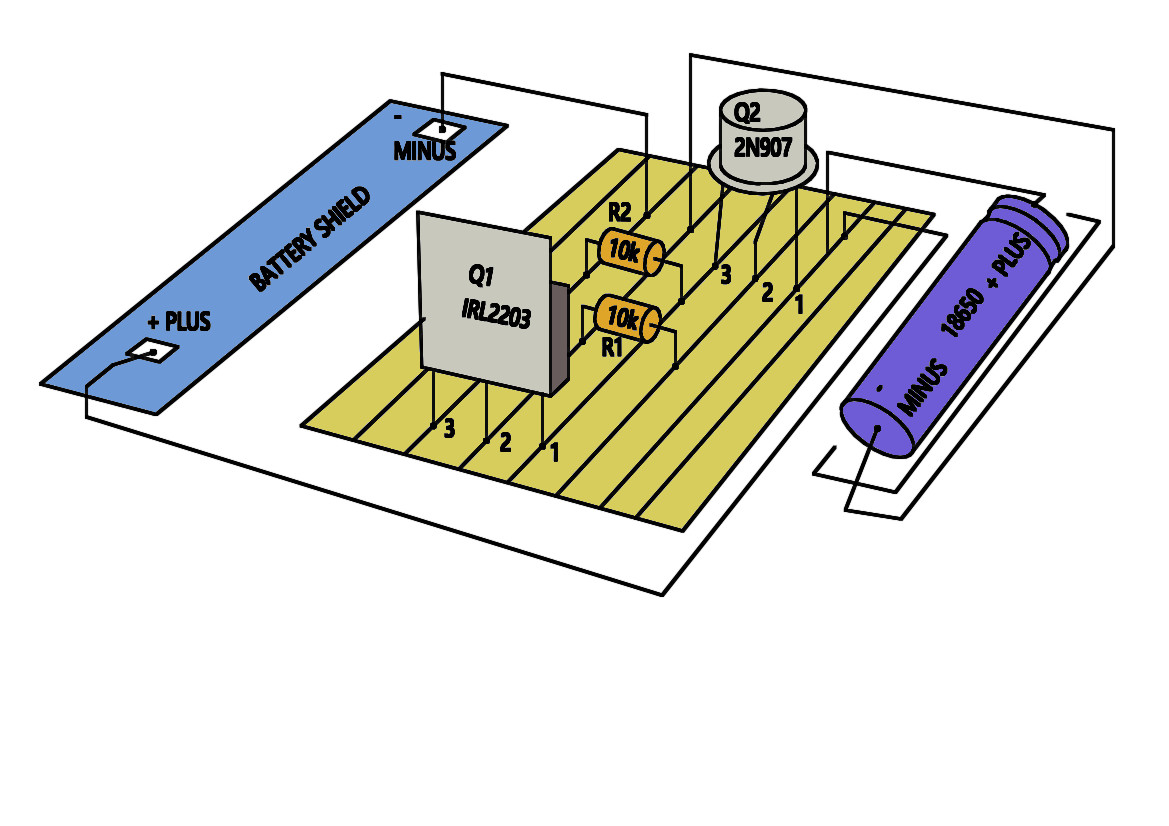
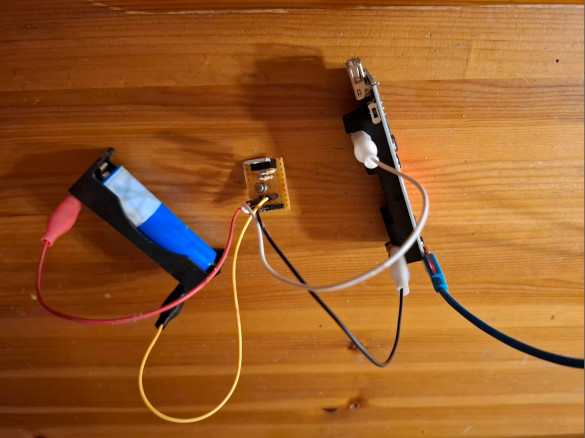
Här är ett foto på kretsen, du kan se vilken typ av ledningar jag har använt och hur jag har lödt komponenterna till kortet.
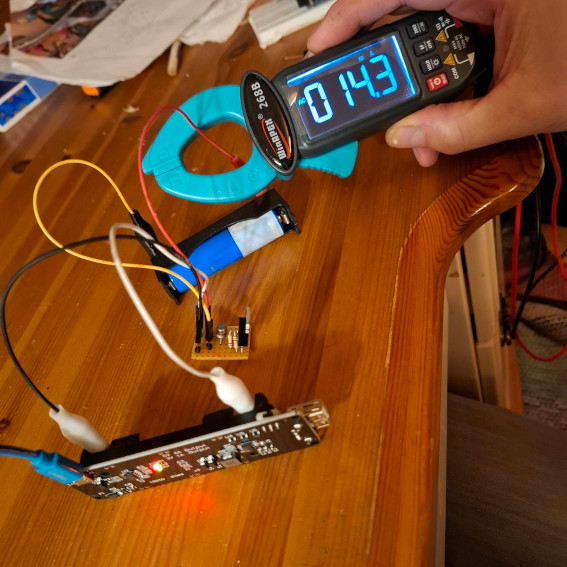
En annan bild på samma krets. Jag kopplade faktiskt 18650 korrekt först. Ingen ånga steg upp från det. Jag var ganska lättad. Jag var tvungen att samla allt mitt mod innan jag satte 18650-batteriet åt fel håll. Nu har jag en ny multimeter, som också har en strömmätningsfunktion. Rätt vänt upp var laddningsströmmen cirka 14,3 mA, fel vänt upp var det ingen ström alls. Så det fungerar nu. Jag lödde en annan kopia av den här ledningen ikväll, så om jag har två kompassremmar kan jag skydda båda från att sätta i batteriet fel. väg in i fallet!

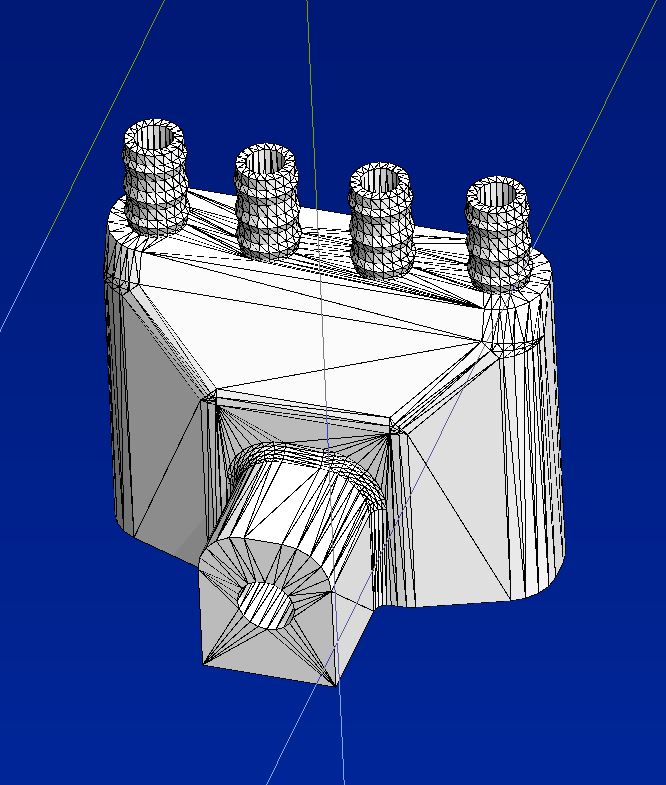
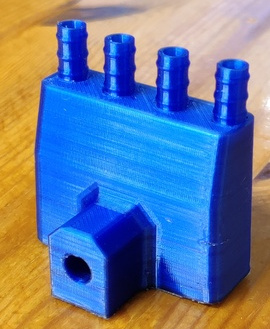
I samband med Arduino-experimenten med blomvattning ville jag att samma mängd vatten alltid skulle gå till de fyra blomkrukorna. Jag föreställde mig att det skulle vara enkelt att göra, men det är det inte. Av någon anledning går vattnet alltid för mycket till en blomkruka, och den andra blomkrukan har ingenting. Jag föreställde mig att om jag gjorde hål av samma storlek skulle det fungera. Först gjorde jag en testversion av plastblock genom att limma, och genom att sticka med en nål gjorde jag hål av samma storlek som möjligt, en lite liknande idé som droppanordningar för infusion på sjukhus. Det fungerade inte, ett hål var alltid lite större och sedan gick vattnet bara till en kruka. Det är därför jag bestämde mig för att om jag provade 3D-utskrift skulle hålen vara exakta. Det fungerade fortfarande inte. Hur det såg ut på insidan såg ut som hälften.
Så såg stl-modellen ut från utsidan. Jag sparade stl-filen av den 3D-modellen till molnservern, eftersom filen var för stor kunde jag inte skicka den som en e-postbilaga. När jag ritade modellen med Unigraphics-programmet, numera heter programmet Siemens NX, var det också en bra övning i 3D-modellering för mig. Till exempel var jag tvungen att komma ihåg att en 3D-skrivare inte kan ha godtyckliga utskjutande delar, eftersom den alltid skriver ut ett lager plast ovanpå ett annat lager, och när den plasten är lite varm kan den klumpa ihop sig lite och förlora sin form. Siemens NX är mycket lämplig för modellering av speciella vågiga och böjda ytor.
Jag hittade utskriftstjänsten på webbplatsen www.tori.fi. www.tori.fi är främst en onlineförsäljning av begagnade varor, ungefär som det som brukade vara i Gula Sidorna. 3D-modellen kostade mig cirka 15 euro, och den kom med posten ganska snabbt. Hur som helst, den 3D-utskriftsexperimentet var inte värt besväret eftersom min princip inte riktigt fungerar. Vattendispensern måste ha en annan form. En fungerande form finns på webbplatsen:

Som ett impulsköp köpte jag en mycket billig LIDAR. Delvis också för att jag redan sett från en YouTube-bloggare att det är möjligt att ansluta några lidarer till Arduino. Och även om robotkonstruktionen fortfarande verkar vara ett för stort projekt för mig, ja, jag kan fortfarande ha drömmar. ... att använda servomotorer, en Arduino och andra sensorer för att göra en så smidig leksak som kan köra runt i min lägenhet, och naturligtvis skulle lidaren vara robotens öga, så att den inte skulle krascha in i dörrar och skada sig, men min robot skulle alltid stanna säkert före något hinder. Detta är fortfarande en ren dröm. Hindret är brist på tid och kanske också tålamod. Jag skulle förmodligen behöva ganska många veckor i rad för att bara fokusera på detta, men jag kan inte spendera alla helger på detta, jag har trots allt många andra hobbyer och andra obligatoriska hushållssysslor. Hur som helst, det här lilla projektet skulle kunna vara ett litet steg framåt på den långa vägen mot att göra min egen robot. Det här är länken till var jag köpte den här underbara enheten.
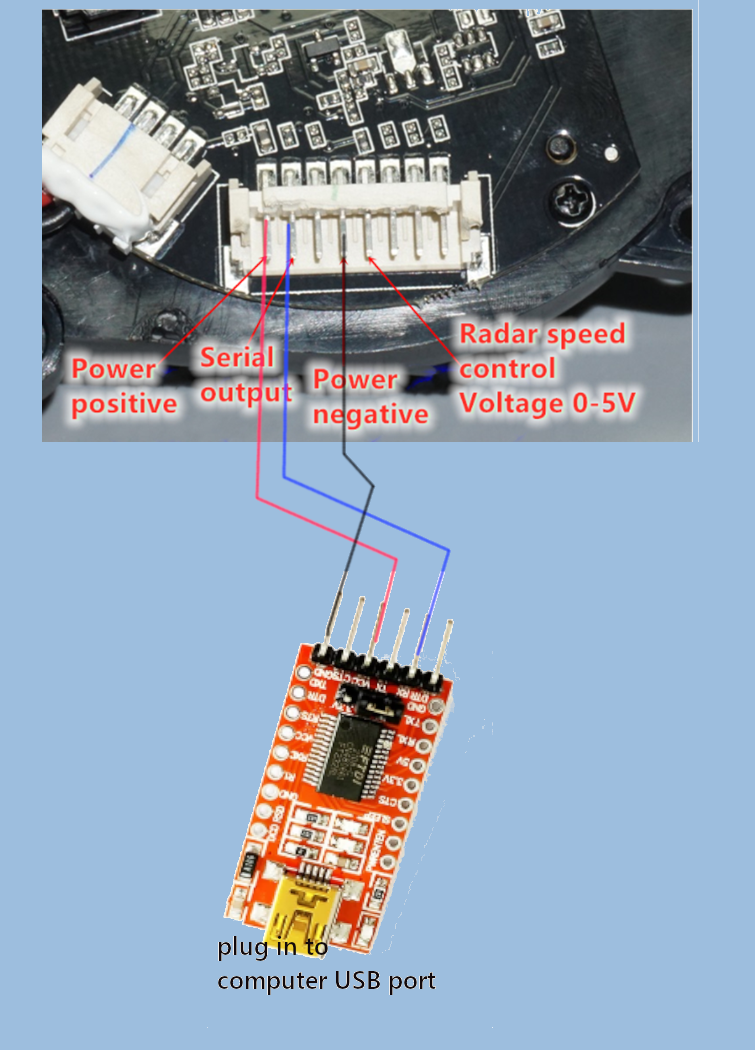
Det finns också en referens på Lidars försäljningssida för att hitta rätt programsnuttar för att avkoda signalen. Denna Discord-diskussionsgrupp blev uppmärksammad eftersom en amerikan publicerade hemliga foton och annan information om kriget i Ukraina, tydligen bara för att skryta om hur mycket han visste. På den specifika kanalen mb_1e2tydlidar-s4b finns en man som heter VIDICON som har undersökt denna lidar djupt. Tydligen har säljaren inte tillhandahållit någon dokumentation om den här enheten. Inte för att säga att det inte är otypiskt för kinesiska leverantörer. VIDICON har tydligen lämpliga signalanalysatorer för att gradvis räkna ut vad alla dess och bytes av datapaket betyder som enheten skickar ut. Wow, jag har stor respekt för att sådana gurus som VIDICON finns i den här världen. Förresten, även om koden kommer från github, var det för mig inte direkt en en-till-en-analys, men jag var tvungen att experimentera lite, vilken typ av baudrate den fungerar med visade sig vara 153600. Som tur var hade min dator redan python installerades med VS Code, men jag var tvungen att lägga till de extra modulerna pygame, serial, math och enum. Jag kan inte komma ihåg, något liknande som sudo apt-get install -y enum var nödvändigt eller kanske motsvarande på en Windows-maskin.
Programmet som listas här är inte exakt samma som github-programmet, men utöver baudrate ändrade jag pygame-kommandot set_at, vilket bara producerar en mycket svag prick på skärmen, och ersatte det med en rektangel pygame.draw.rect, som syns mycket bättre. Jag provade också pygame.draw.circle, men det är helt enkelt för långsamt, det gör många horisontella linjer på skärmen. Jag ändrade också förstoringsfaktorn, distancef = distance / 40, och när jag vill att fler detaljer ska markeras, min egen ansiktsprofil som ett exempel, ställer jag in denna faktor till 3. Jag är dock ganska obekant med pygame och hela programmet är som hebreiska för mig, särskilt den här klassen State(Enum). Jag måste fortfarande bekanta mig med det.
LIDAR-anslutningsschema till datorns USB-port
Testar LIDAR genom att gå runt i min lägenhet
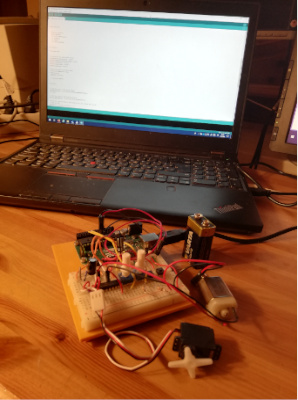
Detta verkar vara en ganska vanlig typ av Arduino-projekt. Jag är fruktansvärt lat på att vattna mina blommor, glömmer ofta bort det i veckor, och jag vill att blomman ska vattnas automatiskt med en pump när vattnet tar slut. Installationen inkluderar en Arduino Uno, vattenpump, vattenslang, vattennivåsensor och Arduino-adapterkort, samt ett blått relä.

Arduino-programkod
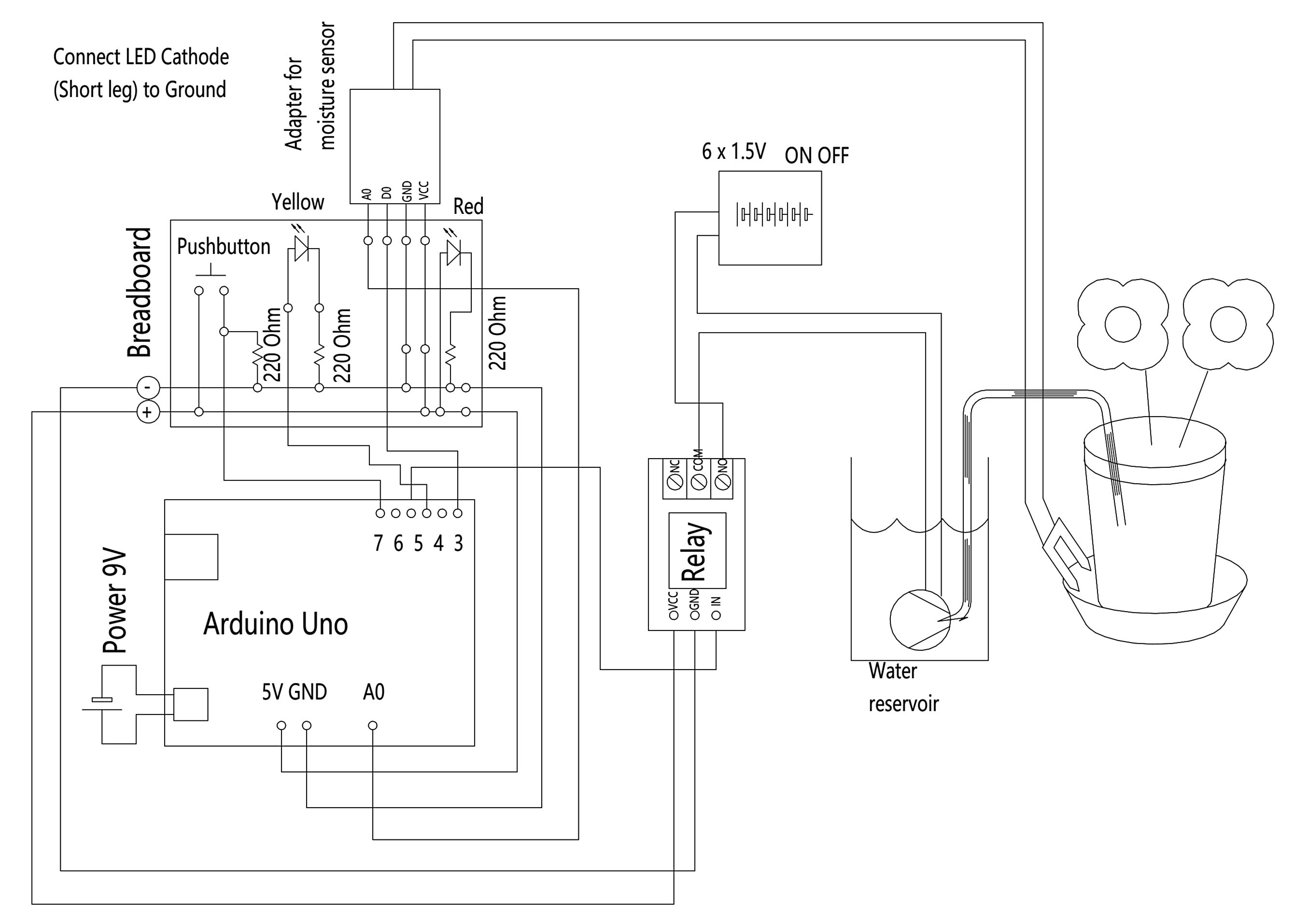
Jag tog ett programexempel från internet som en början. Jag försökte hitta en utmaning för mig själv. Det finns ett fördröjningskommando i det ursprungliga programexemplet, vilket förhindrar att pumpen startar omedelbart när sensorn detekterar att vattennivån har blivit torr. Men vid den tidpunkten avbryts programcykeln. I min programversion avbryts programcykeln aldrig, men sensorsignalförändring orsakar inte någon omedelbar reaktion, utan två olika räknare utlöses och ökas sedan under varje programcykel tills en tidsgräns utlöses igen. Den första räknaren startar när sensorns tillstånd går från vått till torrt. Räknaren väntar sedan en längre tid innan pumpen startar, eftersom det inte spelar någon roll att blomman är torr en kort stund, utan det är viktigare att pumpens batteri inte tar slut eftersom pumpen startar hela tiden och sedan bara går i några sekunder. Å andra sidan, så snart pumpen har startat och börjar fylla vattenbehållaren, måste pumpen stängas av snabbt när sensorn detekterar vatten, annars kommer plattan under blomkrukan att svämma över och vattnet kommer att spillas ner på golvet och orsaka skador. Därför stänger den andra räknaren av sin pump omedelbart när sensorn detekterar vatten i plattan under blomkrukan. För första gången använde jag ett relä, så i princip kan Arduino också ansluta rätt nätapparater, såsom en lampa, ett uttag, element, radio etc. Det känns väldigt spännande att höra reläet klicka! Men det känns fortfarande lite farligt, så alla enheter i detta skede går bara på batteri. senare tillägg: Problemet med den första kretsen och programmet är att tanken som vattnet tas från kan vara tom. Därför, när pumpen startar, är det nödvändigt att förhindra att pumpen går kontinuerligt och pumpens batteri skulle vara tomt. urladdas i onödan, även om det inte finns något hopp om att pumpen kommer att tillsätta vatten till blommorna. För i det här fallet går pumpen tom och pumpar bara luft. Därför, när pumpen startas, startar en separat räknare, och när räknaren har nått gränsvärdet stängs pumpen av och samtidigt tänds den röda lysdioden. Sedan kan jag se från den röda lysdioden att jag måste fylla på vatten i vattentanken. Efter det trycker jag på en återställningsknapp. Återställningsknappen släcker den röda lampan och nollställer pumpens körtidsräknare. Så nästa gång sensorn indikerar att blomman är torr börjar pumpen rotera igen. Men om inte vatten tillsätts i tanken kommer pumpen inte att gå eftersom det skulle vara ett slöseri med batterienergi. Denna räknare bör vara så att behållaren töms inom räknartiden i alla fall.
Även i detta mycket lilla projekt var felsökning det mest tidskrävande av allt. Jag stördes verkligen av funktionen med Arduinos inbyggda seriella monitor som jag inte kan rensa skärmen där med kommandot clear. Från internet hittade jag ett litet Python-verktyg som visar serieportsignalen till terminalfönstret och efter varje cykel rensas terminalfönstret med kommandot clear. Det gör det mycket enklare att följa händelseflödet.

Ursprungligen hade jag en damcykel med välutrustad el. Den hade en LED-frontlampa och en LED-baklampa med parkeringsljusfunktion. Ljuset behövs bara på vintern, men på vintern är vägarna ganska ojämna på grund av snö och is, så att bakljuset slog av i vibrationerna efter bara några månader. Dessutom byter jag alltid ut navgeneratorn för sommaren mot ett nav utan generator, som går med mindre motstånd. Under tiden måste jag också ta bort strålkastaren. Men tyvärr gick den sönder under bytet. OBS! Det var först då jag upptäckte att alla inbyggda elektroniska kretsar som omvandlar strömmen från navets generator till likström som passar LED-lampan. Jag tänkte först köpa en identisk LED som kan anslutas direkt till en nav-generator, men jag kunde inte hitta något på internet (så det finns massor av lampor men inget som tydligt anger att den kan anslutas till en nav-generator). Men jag hittade en guide till USB-laddaren online. Och det finns en hel del LED-lampor för USB-laddning. Jag hade idén att jag skulle kunna ladda min smartphone även på de längre cykelresorna, så den är mer universell. Jag beställde delar online (Farnell, Conrad) och lödde ihop dem på köksbordet. Jag beställde också en USB LED-lampa från Kina, men de levererade inte rätt typ, så jag använde en vanlig LED-ficklampa istället och klamrade fast kabeln direkt där batteriet skulle sitta. En vinter cyklade jag med den, men nu har jag tappat LED-lampan igen. Så jag måste titta runt igen för att hitta en lampa. PS: Nu har jag beställt en modell från Ebay: Union LED Headlight Sidelight Sensor Lux för navet Dynamo".
Jag var ibland stolt över min Lumina-smartphone. Men det tog inte lång tid och den föll till golvet. Eftersom smörgåsen alltid faller med smörsidan mot golvet kraschade handsetet med ansiktet mot golvet. Det hände kanske 2 veckor efter köpet, jag kunde inte stå för tanken att köpa en ny telefon direkt. Lyckligtvis berättade en kollega att dessa smartphoneskärmar kan köpas på nätet och att reparationer kan göras själv, eftersom skärmen även innehåller de nödvändiga verktygen. Det gjorde jag. Ja, det var några skräckögonblick. Det behövs en värmefläkt för att lossa de dubbelhäftande tejperna. Och man måste ha tålamod och inte använda våld.
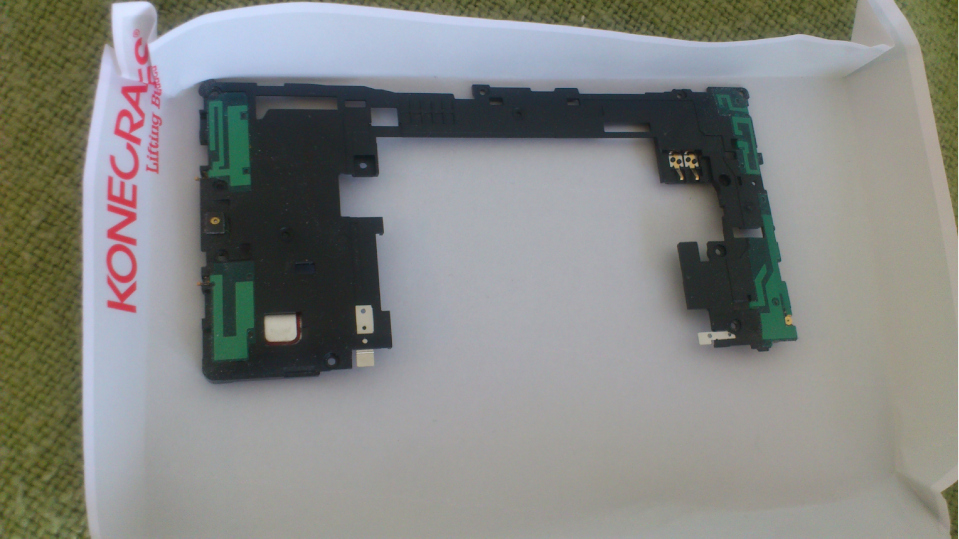
Mycket tack till youtuber, jag kunde ta isär min smartphone
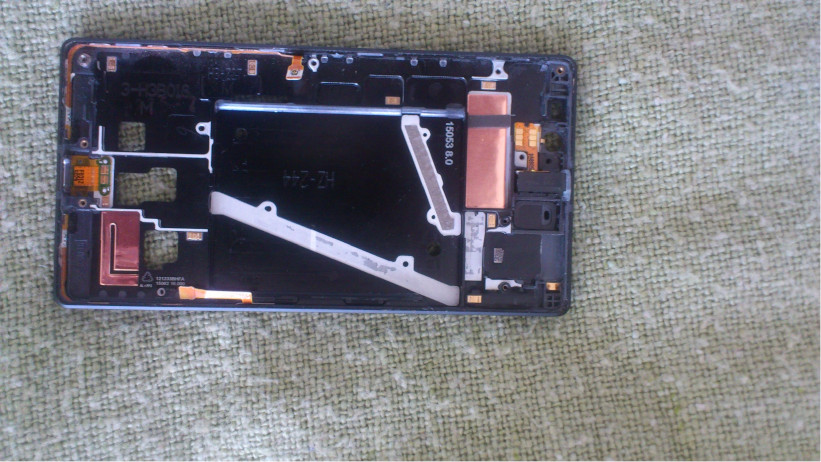

Lyckligtvis hade jag fortfarande en annan telefon tillgänglig under den tiden, så jag kunde titta på instruktionerna om och om igen medan jag hanterade de olika problemen

Kontakterna är verkligen tillverkade av mikroskopiskt små bultar. Efter efterbehandlingen var jag tvungen att trycka fast telefonen ordentligt vid en kontakt för att få tillbaka bilden på skärmen. Motorn för vibration är stor som en russin. Batteriet är limmat med dubbelhäftande tejp och bara genom att värma upp det med en varmluftspistol och samtidigt använda plastverktyget för att ta ut det lossnade det mycket långsamt. Skärmen var också väldigt tät och det tog kanske en halvtimme att lossa den. Och självklart måste den nya skärmen limmas med tvåsidig tejp igen, så jag måste skära ut 2 mm remsor från en vanlig tejprulle.

I biblioteket snubblade jag över Tero och Kimmo Karvinens bok Sulautetut = Embedded. Att läsa boken väckte ingen omedelbar entusiasm, men det var lite som början på en långsamt brinnande eld i mitt huvud. Senare märker jag att kvällshögskolan anordnade en kurs om det. Kursen fick tillräckligt många deltagare, men jag köpte det här startkittet. Låt oss se vart det kommer att leda.
Jag har gjort tidsfördröjda videor på min smartphone. Det uppenbara problemet är att tidsfördröjningen inte går att ställa in, och ett annat är att kameran fortfarande måste stå där hela tiden och någon kan stjäla den. Inställningen kräver: 1. ESP32CAM (till exempel Alibaba) 2. alla typer av 5 V-strömförsörjningspaket (jag köpte från Tokman) 3. USB-kabel, klipp av den och använd endast hankontakten (Clas Ohlson) 4. Två kablar, en honkontakt på sidan som passar dessa ESP32 CAM-nålliknande uttag, den andra sidan krokodilklämmor. 5. SD-kortläsare + kompatibel USB-kabel 6. SD-minneskort Jag hittade onlineinstruktioner om hur man gör en liten låda till ESP32 med en 3D-skrivare. Jag har inte den här, men den fungerar också med en plastlåda från mitt cykelreparationskit. Jag limmade fast olika träbitar på insidan av lådan med lim så att ESP32 passar snyggt inuti. Jag måste fortfarande skära små skåror i träbitarna med en kniv, annars kommer Rst- och blixtknappen att störa.
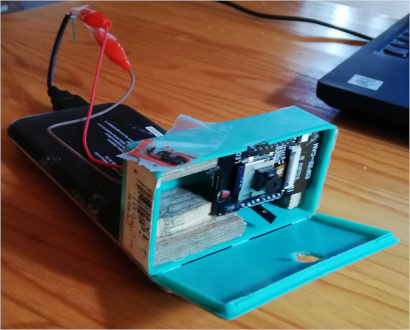
På baksidan av lådan gjorde jag ett hål för 5V och för jordkabeln, deras kontakter är tyvärr lite för långa. Frontskyddet har ett hål för kameran. Det kan göras med en borr eller kniv. ESP 32 måste sitta ganska hårt, annars sjunker den och bilden blir skevgången.
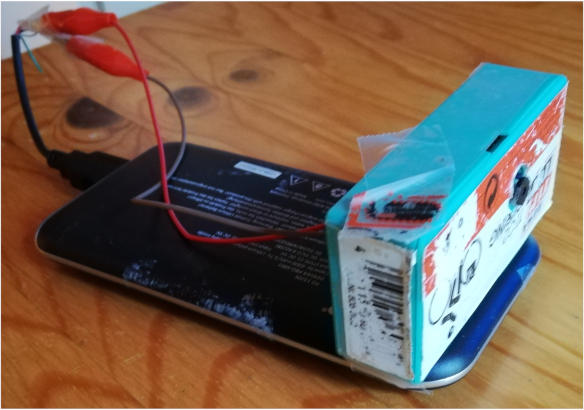
Jag var rädd för att det skulle regna under fotograferingen, så jag placerade ESP 32 i vindrutan på ett levande ljus. Vinden var alltid ganska stark, vindrutan kan också hindra ESP32 CAM från att flyga iväg av vinden.

När bilden är klar tar jag med mig ESP 32 CAM in i huset och stoppar den, antingen via Wi-Fi eller genom att dra ut 5 V-kabeln, ta ut SD-kortet och läsa av SD-kortet genom den här kortläsaren. Den kortläsaren var en rest av en gammal pixelkamera som jag hade ibland. Men kabeln var speciell, med en smal USB mini-A-kontakt.
Den här guiden är nu lite som för mig själv.<br />
Kom ihåg:<br />
Mobilt Wifi måste vara påslaget. Inställningar -> Trådlöst och nätverk -> internetdelning och bärbar hotspot-> Bärbar Wifi-hotspot<br />
Datorn måste vara ansluten till mobilens Wi-Fi Ctrl + X -> Wifi -> visa tillgängliga nätverk -> Anslut<br />
Wifi-adressen fungerar bara med Firefox-webbläsaren på http://192.168.43.209/<br />
(inga https)<br />
Starta Arduino ino-programmet. Justera även Wifi ssid och lösenord korrekt inuti programmet.<br />
<br />
ladda Timelapse-programmet<br />
<br />
Anslut ESP32CAM till datorn med en USB-kabel. ESP32CAM-enheten har inga problem även om den är ansluten till strömförsörjningen samtidigt. (batterispänningen kan vara lägre än USB-kabelns spänning) <br />
<br />
Kontrollera port COM3 eller COM7<br />
<br />
Arduino Tools-> kontrollera att alla inställningar är korrekta.<br />
<br />
Minst:<br />
<br />
Wifi101 / WiFiNINA Firmaware Updater<br />
<br />
Kort ESP32 Wrover-modul<br />
<br />
Uppladdningshastighet 115200<br />
<br />
Flashmode QIO<br />
<br />
Partitionschema Stor APP (3MB Ingen OTA / 1MB<br />
<br />
Core debug Level .None<br />
<br />
Programmer AVR ISP<br />
<br />
Tryck på upload i Arduino.<br />
Håll ner RST- och blinkningsknapparna. När uppladdningen startar, dvs. när .... ---- ....---- visas på programmets kommandoskärm, släpp den första knappen. Då bör de blå lysdioderna tändas.<br />
<br />
Detta fungerar sällan första gången. Först när de blå lysdioderna tänds börjar saker och ting fungera.<br />
<br />
Vid den tidpunkten växlar jag mellan COM 7 och COM 3. Märkligt nog visar programmet alltid ESP32 Wover-modulen till COM7 eller COM3. När jag skriver detta var det COM7.<br />
<br />
Jag öppnar fortfarande seriell monitor. och jag trycker på återställ. I detta sammanhang bör SD-kortets storlek också visas på skärmen.<br />
<br />
SD-korttyp: SDHC<br />
SD-kortstorlek: 32000 MB<br />
<br />
Totalt utrymme: 31936 MB<br />
Använt utrymme: 0 MB<br />
.........<br />
WiFi anslutet<br />
Startar webbserver på port: '80'<br />
Startar strömningsserver på port: '81'<br />
Kamera redo! Använd 'http://192.168.43.209' för att ansluta<br />
<br />
Då kan bara Firefox-webbläsaren öppnas och ange dess adress där.<br />
Sedan ansluter jag 5V- och GND-kablarna och kopplar ur USB-kabeln och försöker se om strömmen fortfarande fungerar fungerar.<br />
<br />
Jag ställde in timelapse-funktionen på 3000-6000 ms.<br />
Upplösning CIF (400x296) när jag placerade den närmare, blev det obehagliga störningar i bilden.<br />
<br />
Jag tar med mig allt, min dator, mobiltelefon och ESP 32 Cam till den plats där jag tänkte göra tidsfördröjningsvideon.<br /> Sedan placerar jag ESP CAM så horisontellt som möjligt, och för detta använder jag stillbildsfunktionen och ser till att bilden är korrekt. V-flip kan också behövas. Först då trycker jag på timelapse-bilden.<br />
<br />
Du kan sedan låta den vara igång, många gånger lämnar jag den ute i en timme. Jag tar tillbaka min dator. Wifi-antennens radie kan nå 10 m. Under timelapsen behövs ingen Wifi
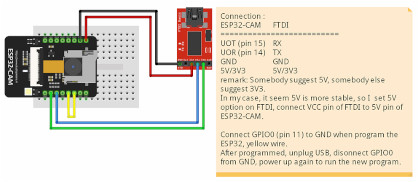
Nu finns det ytterligare en ESP32: den har inte en inbyggd opacitetsenhet, utan en extern enhet som heter CP2102 USB till TTL seriell omvandlarmodul. Den levereras också med en Wifi-antenn, tack vare vilken räckvidden redan är 15 m eller mer. I programmeringsfasen måste kablarna vara som visas. Programmet kommer att överföras från Arduino IDE samtidigt som tidigare. Men efter att programmet har överförts måste du först koppla bort kabeln som ansluter GPIO0 och GND. Sedan trycker jag på återställning, och sedan får jag läsa av enhetsadressen på Arduinos seriella monitor, vilket är http://192.168.43.40. Efter det kan jag också ta bort RX- och TX-joderna. Enheten behöver bara 5V och GND för att fungera. Först sätter jag på Mobiltelefoninställningar - Internetdelning och bärbar hotspot - Bärbar Wifi-hotspot - ... PÅ. Sedan sätter jag först på smarttelefonens webbläsare Ny inkognitofliken i det övre högra hörnet, där det finns tre punkter. Sedan anger jag adressen till ESP32-kameraenheten i webbläsarens adressfält. Om enheten är påslagen borde du redan ha sett kamerabilden. Om inte, trycker jag fortfarande på återställningsknappen. Och då kan jag starta en serie tidsfördröjningar på min mobiltelefon. Det är så det borde fungera.
När jag installerar ESP32 för programmering måste jag gå till Arduino IDE Tools manage Library, och där borde jag kunna hitta bitluni ESP32Lib

File- Preferences
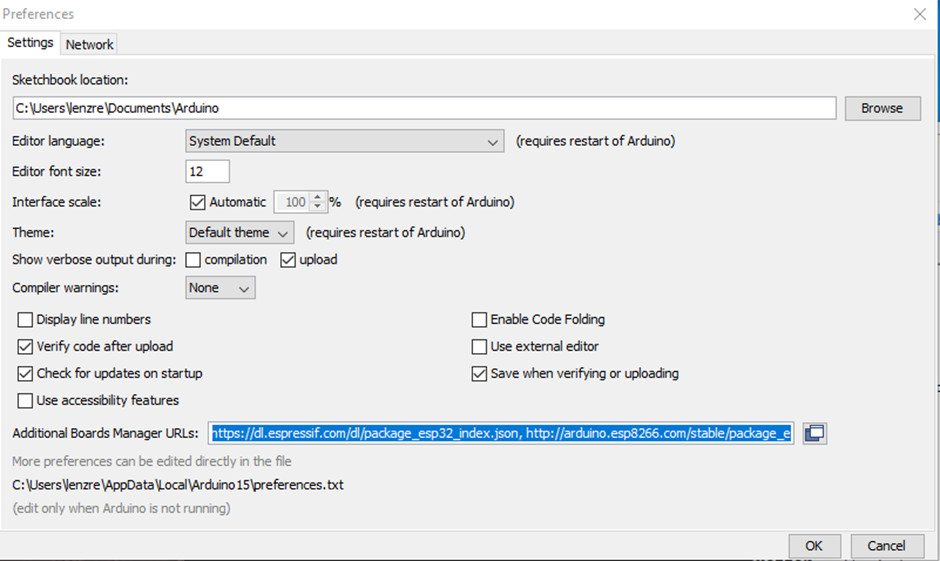
https://dl.espressif.com/dl/package_esp32_index.json/
http://arduino.esp8266.com/stable/package_esp8266com_index.json/
Upload speed 115200
Flashmode QIO
Partition scheme Huge APP (3MBNo OTA /1MB
Core debug Level .None
Programmer AVR ISP r this, I will be able to select in tools Board Board ESP32 Wrover module
]]>