前言:到2026年4月,我准备推出这款指南针腰带的新版本。指南针腰带的基本原理没有改变,但电机直接由电池供电,因此微处理器无需自行提供大电流。微处理器也被更小的型号所取代。电机数量仅为16个。新款指南针腰带的链接如下。这里描述的指南针腰带也运行良好(最大的缺点是盒子比较大),所以我保留了原有的文字,但不会再更新,并将两个版本分开保存。这段文字下方是对制作过程的一些详细描述,这些内容我不会在新项目中重复,所以我认为保留这些文字是合适的。

據說許多遷徙動物,例如鳥類和魚類,在遷徙時都能辨別羅盤方向,有時遷徙距離很長,無論白天還是黑夜,而且通常天氣非常惡劣。
對於人類來說,這種知識可能是必要的,例如,在陌生的地方採摘漿果,或者只是迷失方向時。
指南針腰帶是一種無需看指南針就能知道北方的腰帶。它內置小型振動馬達和一個可以檢測地球磁場的傳感器。佩戴時,指向北方的馬達會輕微振動,讓佩戴者擁有“直覺”的方向感。
為什麼這很酷?想像一下,你在黃昏時分在森林裡採蘑菇,迷失了方向。戴上這條腰帶,你就能時刻感受到北極的“刺痛感”,這能幫助你在沒有地圖或指南針的情況下保持方向。
我在網路上訂購了電子零件,大約花了 60 美元。
然後,我將振動馬達縫製並焊接到一條彈性織物腰帶上。
我加了一個塑膠扣,並用紡織管保護它。
作為一個具備電子基礎知識的定向越野愛好者,我發現這個項目既有趣又實用。無論您是探索新路線,還是只是喜歡酷炫的小玩意,指南針腰帶都是您的好夥伴!
方向調節
調整旋鈕可在0度到360度之間調整方向
震動模式
雙擊可在連續和間歇振動之間切換。單擊可在1秒、2秒、3秒或4秒之間切換。長按可快速測試所有振動器是否正常工作。
智慧型感應器
一個自我校準磁力計,可以辨識您是在行走、騎腳踏車還是站立。
電池供電,可導航數小時。
兩顆電池可提供約 3 小時的使用時間。
此電路旨在將 Arduino Mega 2560 或 Arduino Due 與各種組件連接,包括雙向邏輯電平轉換器、微調電位器、多個振動電機、Adafruit BNO085 9 自由度方向 IMU 融合器以及其他組件。該電路由 18650 電池供電,並包含一個用於電源的功率撥動開關。已編程為根據來自 IMU 和其他感測器的輸入控制振動電機,提供有關北方的觸覺回饋。
基於 Atmel SAM3X8E ARM Cortex-M3 CPU 的微控制器板。
具有多個 I/O 接腳、PWM 輸出和通訊介面。
用於安全地連接不同電壓電平,例如 3.3V 和 5V。
一個阻值為 10k 歐姆的可變電阻器,用於調節電壓電平。
兩個阻值為 4.7k 歐姆的電阻器和一個阻值為 10k 歐姆的電阻器,用於限流並用作 I2C 總線的上拉電阻。
多個小型馬達用於提供觸覺回饋。
一款結合加速度計、陀螺儀和磁力計提供方向資料的感測器模組。
為電路供電。
用於控制電路的電源。
用於使用者輸入以控制電路的行為。
用於提升電池電壓的 DC-DC 升壓轉換器。
A2:連接到微調電位器的滑動端。
A1:連接到電阻(10k 歐姆)和按鈕的腳位 2。
D20/SDA3:連接到雙向邏輯電平轉換器的 HV4。
D21/SCL3:連接到雙向邏輯電平轉換器的 HV3。
5V:連接到雙向邏輯電平轉換器的 HV。
GND:連接到雙向邏輯電平轉換器的 GND、電阻 (10k Ohm)、微調電位器、Adafruit BNO085、升壓模組 MT3608 和振動馬達。
VIN:連接到撥動開關的 L1。
D26 至 D45:連接到各個振動馬達的正極。
GND:連接到 Arduino Mega 2560 或Arduino Due 和其他元件。
HV:連接到 Arduino Mega 2560 或 Arduino Due 的 5V 端。
HV3:連接到 Arduino Mega 2560 或 Arduino Due 的電阻 (4.7k 歐姆) 的引腳 1 和 D21/SCL3。
HV4:連接到 Arduino Mega 2560 或 Arduino Due 的電阻 (4.7k 歐姆) 的引腳 1 和 D20/SDA3。
LV:連接到 Arduino Mega 2560 或 Arduino Due 的電阻 (4.7k 歐姆) 的引腳 2 和微調電位器的引腳 2。
LV3:連接到 Adafruit BNO085 的 SCL。
LV4:連接到Adafruit BNO085。
滑動端:連接到 Arduino Mega 2560 或 Arduino Due 的 A2 腳。
腳位 1:連接到雙向邏輯電平轉換器的 GND。
腳位 2:連接到雙向邏輯電平轉換器的 LV。
10k 歐姆:腳位 1 連接到 Arduino Mega 2560 或 Arduino Due 的 A1 腳,腳位 2 連接到 GND。
4.7k 歐姆:接腳 1 連接到雙向邏輯電平轉換器的 HV3 和 HV4 腳,接腳 2 連接到雙向邏輯電平轉換器的 LV。
正極:連接到 Arduino Mega 2560 或 Arduino Due 的 D26 至 D45。
負極:連接到 Arduino Mega 2560 或 Arduino Due 的 GND。
3.3V:連接到雙向邏輯電平轉換器的 LV。
GND:連接到 Arduino Mega 2560 或 Arduino Due 的 GND。
SCL:連接到雙向邏輯電平轉換器的 LV3。
SDA:連接到雙向邏輯電平轉換器的 LV4。
串聯連接,第一個 18650 電池的 + 極連接到第二個 18650 電池的 + 極。
第一個 18650 電池的 - 極:連接到 MT3608 的 VIN-。
第二個 18650 電池的 + 極:連接到 MT3608 的 VIN+。
L1:連接到 Arduino Mega 2560 或 Arduino Due 的 VIN。
COM:連接到 MT3608 的 VOUT+。
VIN-:連接到第一個 18650 電池的負極。
VIN+:連接到第二個 18650 電池的正極。
VOUT-:連接到 Arduino Mega 2560 或 Arduino Due 的 GND。
VOUT+:連接到撥動開關的 COM。
腳位 1:連接到雙向邏輯電平轉換器的 LV。
腳位 2:連接到 Arduino Mega 2560 或 Arduino Due 的 A1 端,並連接到 10 k Ohm 電阻的腳位 1。電阻。
Arduino Mega 2560 或 Arduino Due 使用包含多個庫的 Sketch 進行編程,這些庫用於處理觸覺帶、指南針和按鈕輸入。代碼初始化 IMU 感測器並設置振動電機以提供觸覺反饋。主循環讀取按鈕狀態,並根據感測器數據或串行輸入更新指南航針。
Github 指南針腰帶庫:包含用於處理觸覺帶和指南針的自訂庫,以及用於按鈕點擊的標準庫 OneButton.h、用於 I2C 通信的 Wire.h 和用於 BNO08x 感測器的 Adafruit_BNO08x.h。
引腳配置:定義按鈕和振動馬達的引腳。
感測器初始化:初始化BNO08x 感測器並設定所需的報告。
主循環:持續讀取按鈕狀態,更新指南針航向,並根據航向控制觸覺帶。
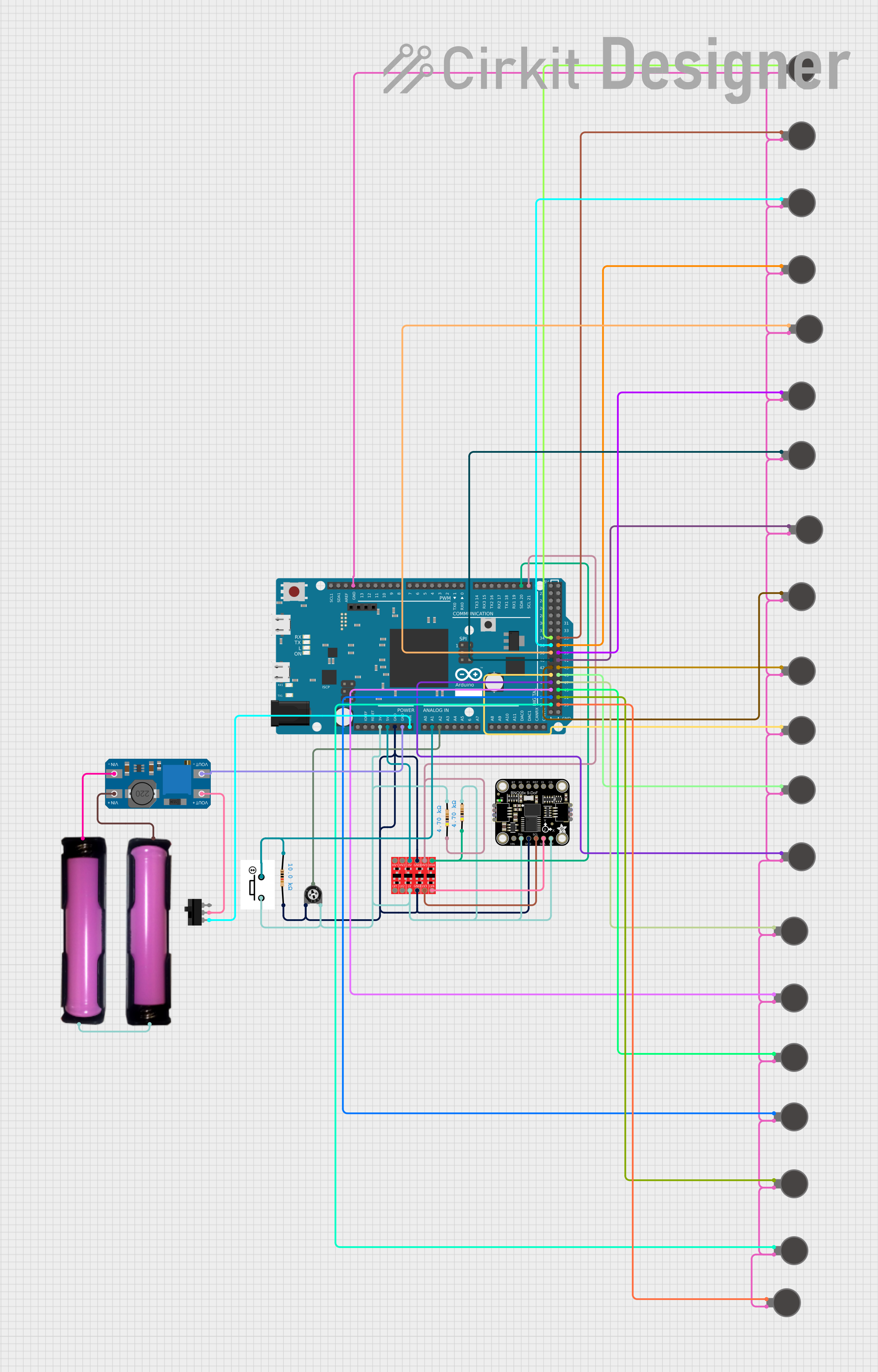
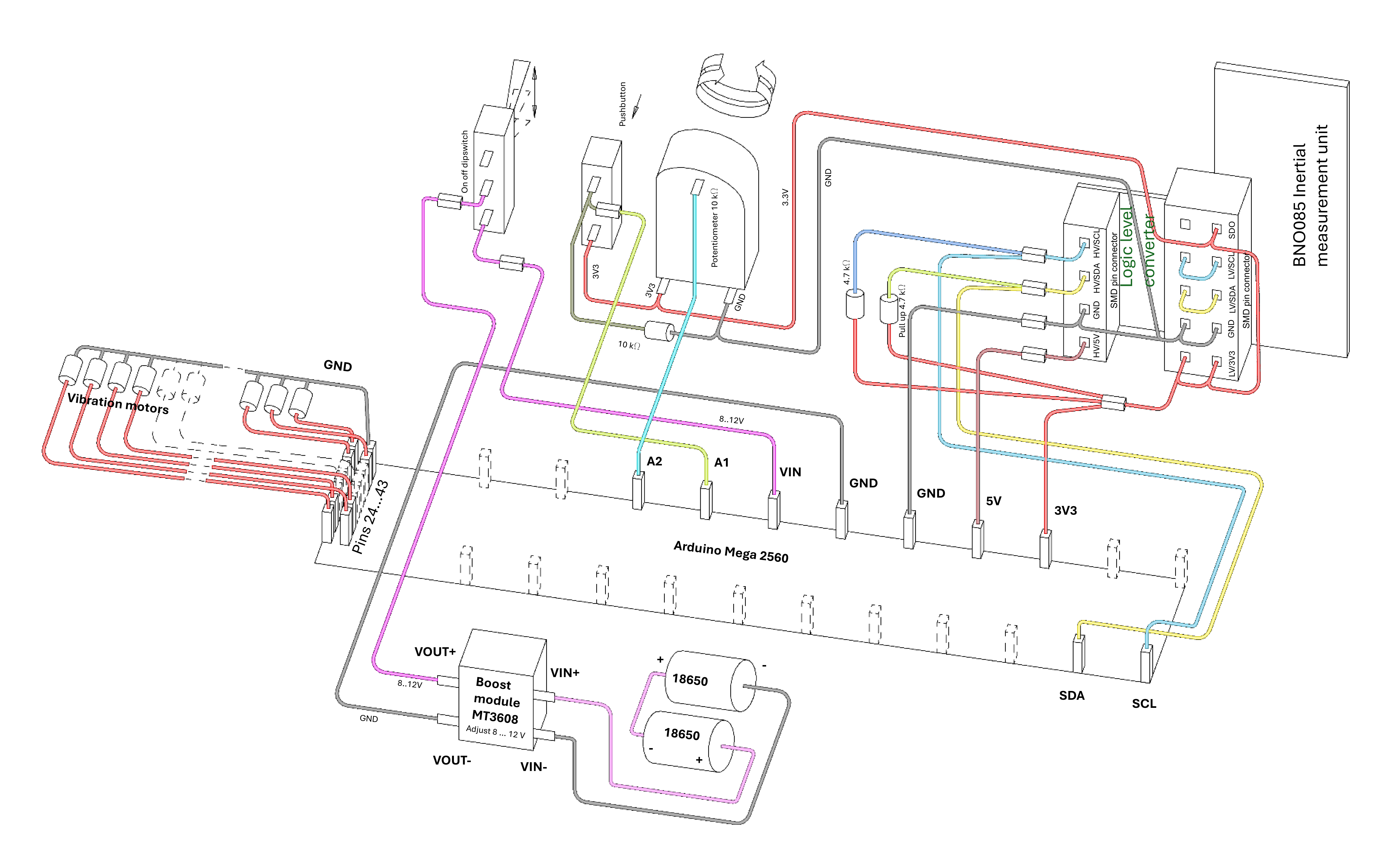
放大主圖中的重要部份
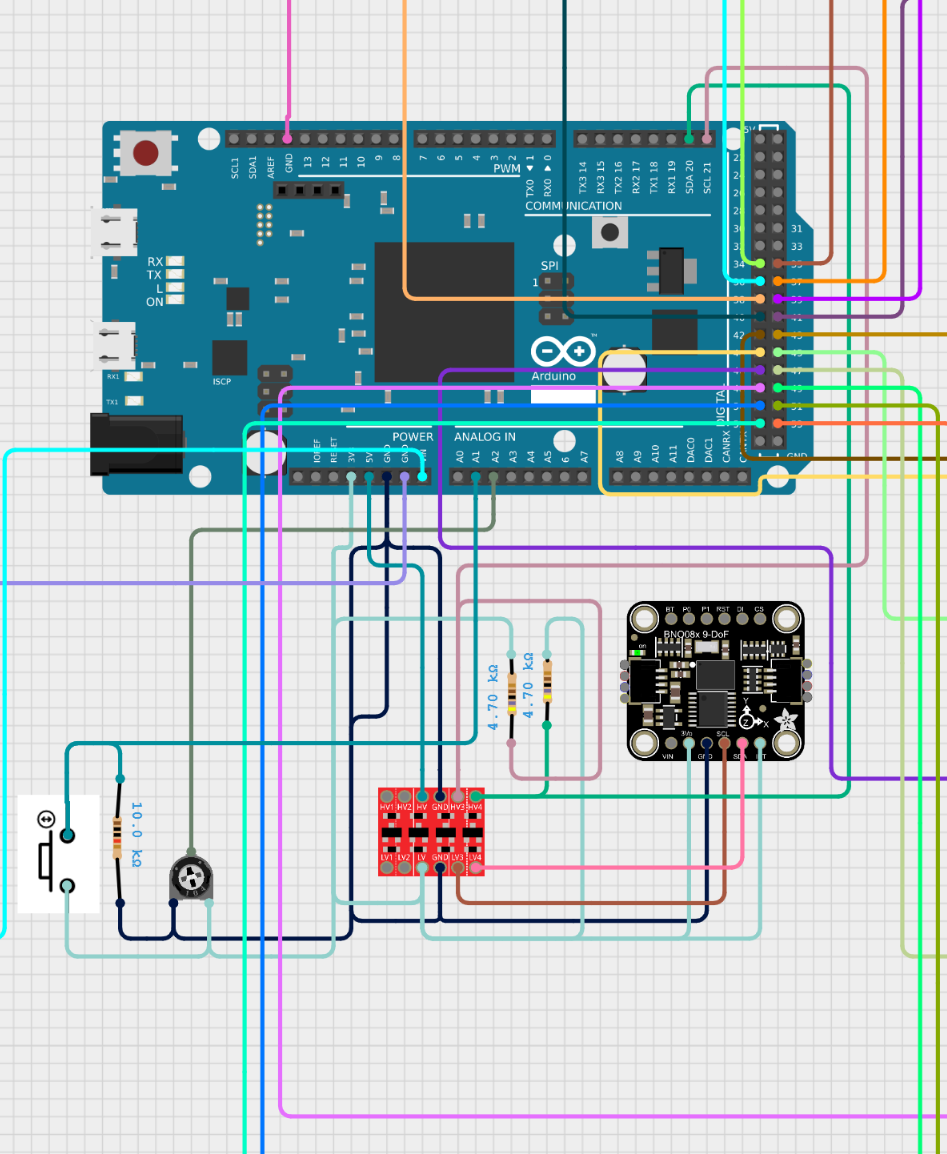
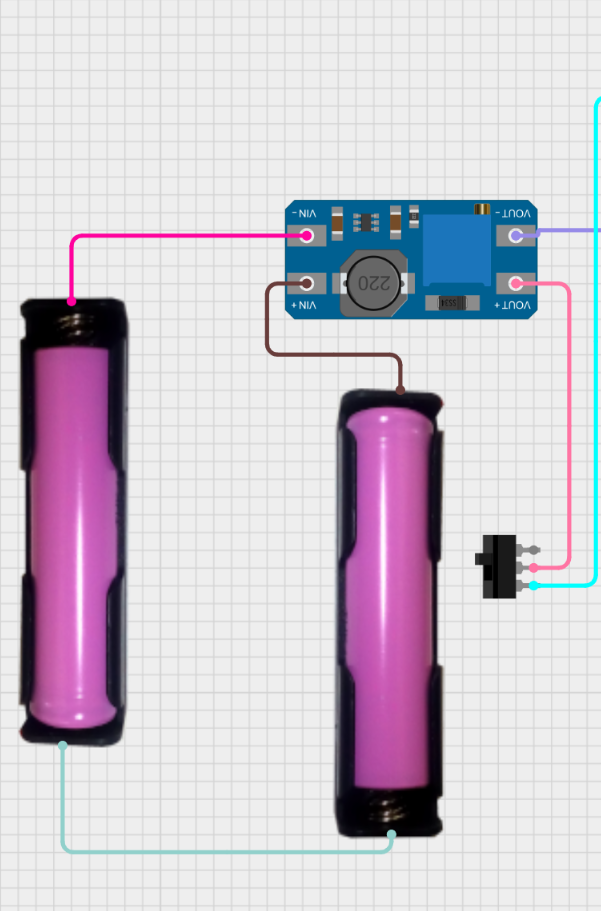
放大主圖中的升壓轉換器部分
電路圖。圖片顯示的是 Adafruit BNO08x,但我實際上使用的是 BNO085 slimeVR。接口相同。當電源電流中斷時,可以使用保護續流二極管來消除電感負載中的突然電壓尖峰。但這裡的電流尖峰顯然足夠小,Arduino 還沒有損壞。
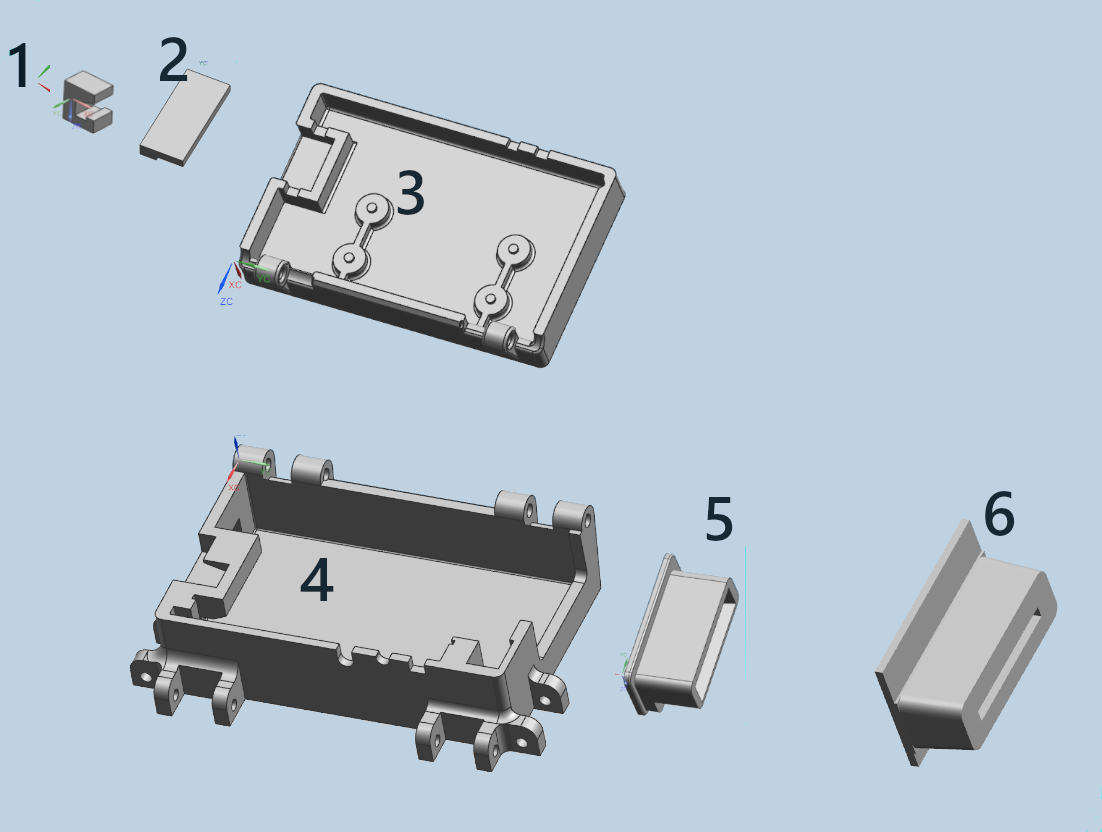
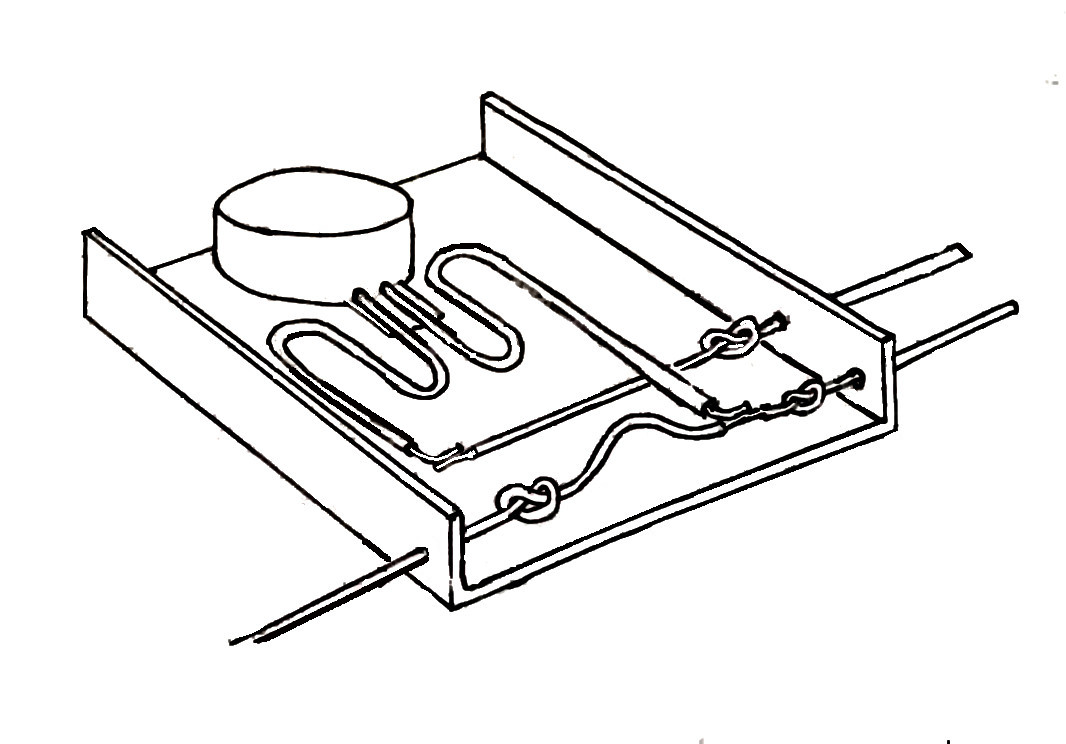
此盒子由 6 個不同部分組成:1:滑塊閉合器。2:用於閉合插槽的懸垂部分。3:上盒 4:下盒。5:內部電纜密封套。6:外部電纜密封套。
滑桿 (1) 的設計類似於夾具。它可以在插槽中前後移動。插槽中有一個可以打開盒子的位置。但是,如果推動滑塊,使夾具狀滑塊夾住舌片,則盒子將無法再打開。插槽是通過將部件 (2) 粘合到屏幕頂部 (3) 而形成的塊。黏合到位後無法插入滑塊。 (6),但首先要將黏合劑塗抹在縫隙中。
盒子有四個鬆緊帶接口,兩個在側面,兩個在頂部。盒子的最佳位置是放在胸前。當盒子放在胸前時,也很容易操作用於調節方向的電位器、開關和按鈕。根據我的經驗,跑步時用腰帶將盒子固定在側面是不夠的;你還需要用紡織彈性帶製成的“背帶”,圍繞在手臂上滑落。
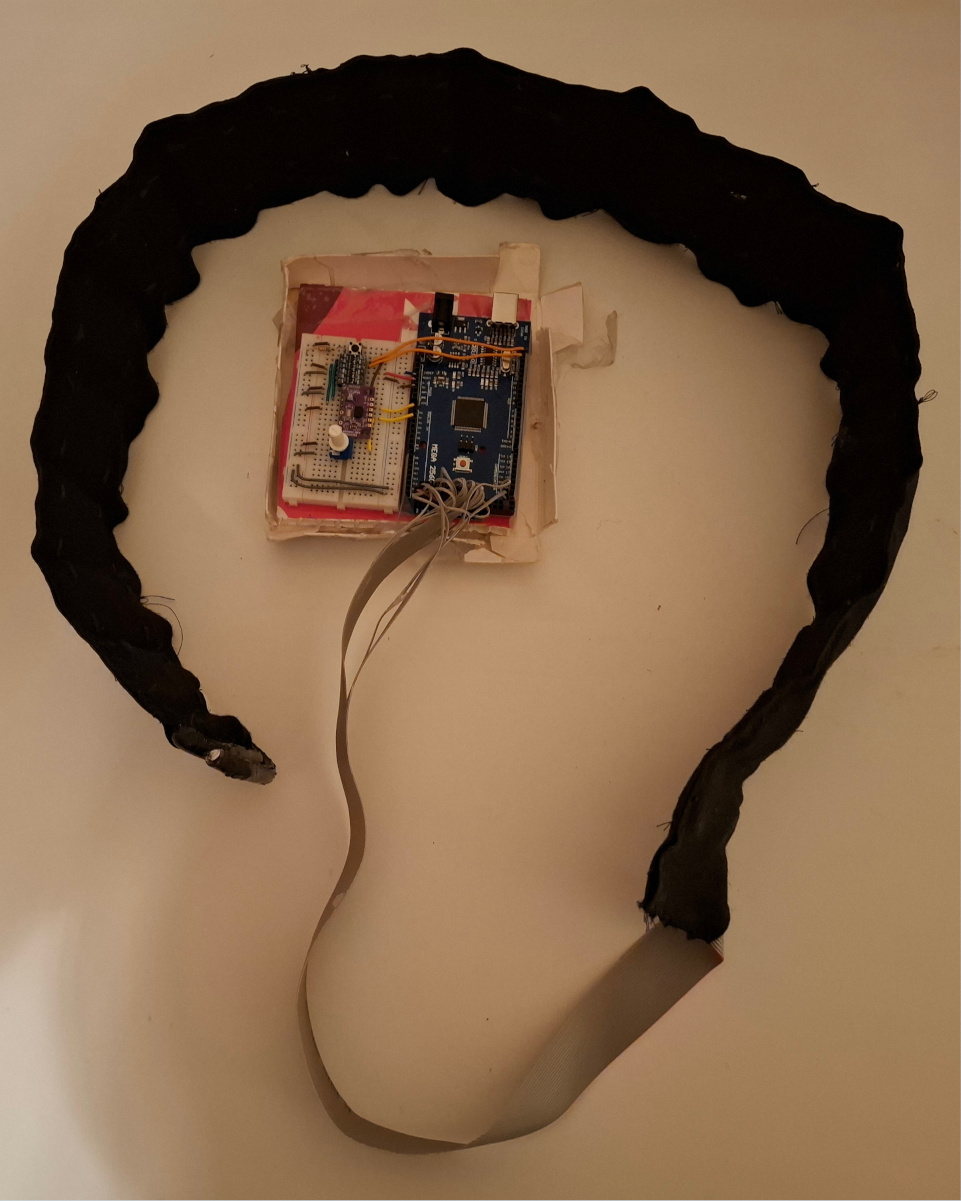
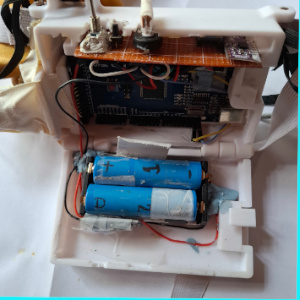
在這張圖片中,您可以看到從正面打開的 3D 列印外殼。Arduino 位於中間,振動馬達的連接器位於左側。在這裡,您可以看到接地線在接線端子處有一個小的“彎頭”,因為 GND 連接器在連接器排中是分開的。在右上角,您可以看到時鐘585 感應器。 SDA(數據)線,但線的顏色與圖中不同。
「在這裡您可以完整的指南針腰帶位於電子外殼前方,左側帶狀線纜連接至振動馬達腰帶,腰帶由黃色布料保護。外殼本身我用自製的彈性紡織膠帶纏繞在腰帶腹部,或者也可以放入褲袋中。皮套和腰帶之間有一個約30厘米的環,因此皮套可以放入褲袋、腰包甚至背包中。皮套有兩個橡皮筋接口,一個用於水平放置,一個用於垂直放置。
指南針腰帶外覆黃色合成纖維布料。這種布料輕薄光滑,速乾,也可取下放入洗衣機清洗。定向越野運動會出汗,身體會不斷接觸潮濕髒污的樹枝和細枝。布料不能是氈狀的,因為氈狀布料會伸出細小的纖維末端,像小鉤子一樣鉤住物體的縫隙、隱藏的電纜和小插頭,導致電纜或插頭的小扭結被絨毛鉤住。電氣盒必須用其自備的彈性織物帶固定。這兩條帶子都舒適地繫在身上,確保整個裝置在定向越野運動中也能正常運作。皮套和皮帶之間的電纜現在不必要地鬆了,可以用橡膠帶縮短。電子外殼不能隨意擺動,因為感測器測量自身在三維空間中的位置時會發出錯誤訊號。原則上,感測器會補償任何傾斜,但正如一般來說,它應該處於水平位置。
我不喜歡Arduino和每個振動電機之間只用一根線,這樣會弄得一團糟。扁平電纜方案似乎更簡潔。與桶的距離應該更能反映真實的方向,但由於人的腰部並非真正的圓形,而更像橢圓形,所以需要調整電機點之間的距離。為了方便腰圍更大的人使用指南針腰帶,我使用了110公分的腰圍。
縫有扣環的柔性紡織帶、捲尺和鋪設在地面上的扁平電纜。我標記了中間點。在柔性紡織帶上,遠處放置了振動馬達的試驗「巢穴」
扣環母頭部分的末端。實際上,扣環的寬度大於兩個振動馬達之間的正常距離,因此可能會出現一些誤差。

扁平電纜的兩端用膠帶粘在地板上,因此扁平電纜是直的。扁平電纜上有 26 根電線,所以我保留了最外面的 3 根電線,沒有進行切割。首先,我會根據切割長度表格,用氈尖筆標記切割點。然後,完成所有標記並檢查(從兩側檢查,應該是對稱的)後,,用氈尖筆標記。

所有單根電線都標記好後,我會用刀沿著標記點切開扁平電纜。我會穿過所有標記點。

這是最後一步。切開後,繼續切開,直到兩條對稱的扁平電纜完全分開。最後用鋼絲鉗進行切割。

振動馬達配備 JST-SH 公頭連接器。因此,我購買了合適的母頭連接器。這些連接器需要焊接。連接器的針腳非常 小的。

最好只使用少量錫,以保持導線盡可能柔韌。焊點更脆,無法承受太大的彎曲。

我在放大鏡下用熱烙鐵刮開了接地線。我用支架和夾子牢牢夾住了扁平電纜。我將一塊金屬板塞入接地線和另一根電纜之間的縫隙作為底座。然後用熱烙鐵小心地刮掉電纜護套,注意不要折斷導線。

很明顯,如果電纜經常受到輕微的來回彎曲,焊接點很容易斷裂,指南針帶肯定就是這種情況。這就是為什麼我用環氧膠(雙組分粘合劑)將所有焊接點牢牢粘住。首先,我用透明膠帶纏繞插頭,形成一個“槽”。然後,所有帶插頭的電纜末端都用透明膠帶牢牢粘在桌子上,這樣就不會移動。
圖片展示了扁平電纜是如何用兩個夾子固定的。下面是一把鋼絲刷,我用它來去除烙鐵上熔化的塑料。用另一個可彎曲的鵝頸管支撐著穩定的烙鐵。我首先通過放大鏡檢查,以確保烙鐵大致對準目標,然後通過放大觀察。

黃色電線從下方連接到第二個鵝頸夾。烙鐵放在第二個鵝頸夾上。務必在焊接點塗抹助焊劑。我盡量少用錫,因為鍍錫線易碎,所以最好選擇盡可能短的鍍錫線。使用磁性柔性鵝頸夾焊接可以加快兩隻焊接速度,因為你需要加快兩隻以上的手。

圖片展示了我如何用電工膠帶纏繞振動電機的出線,使它們保持整齊的連接。此處可能還需要一根熱縮管。
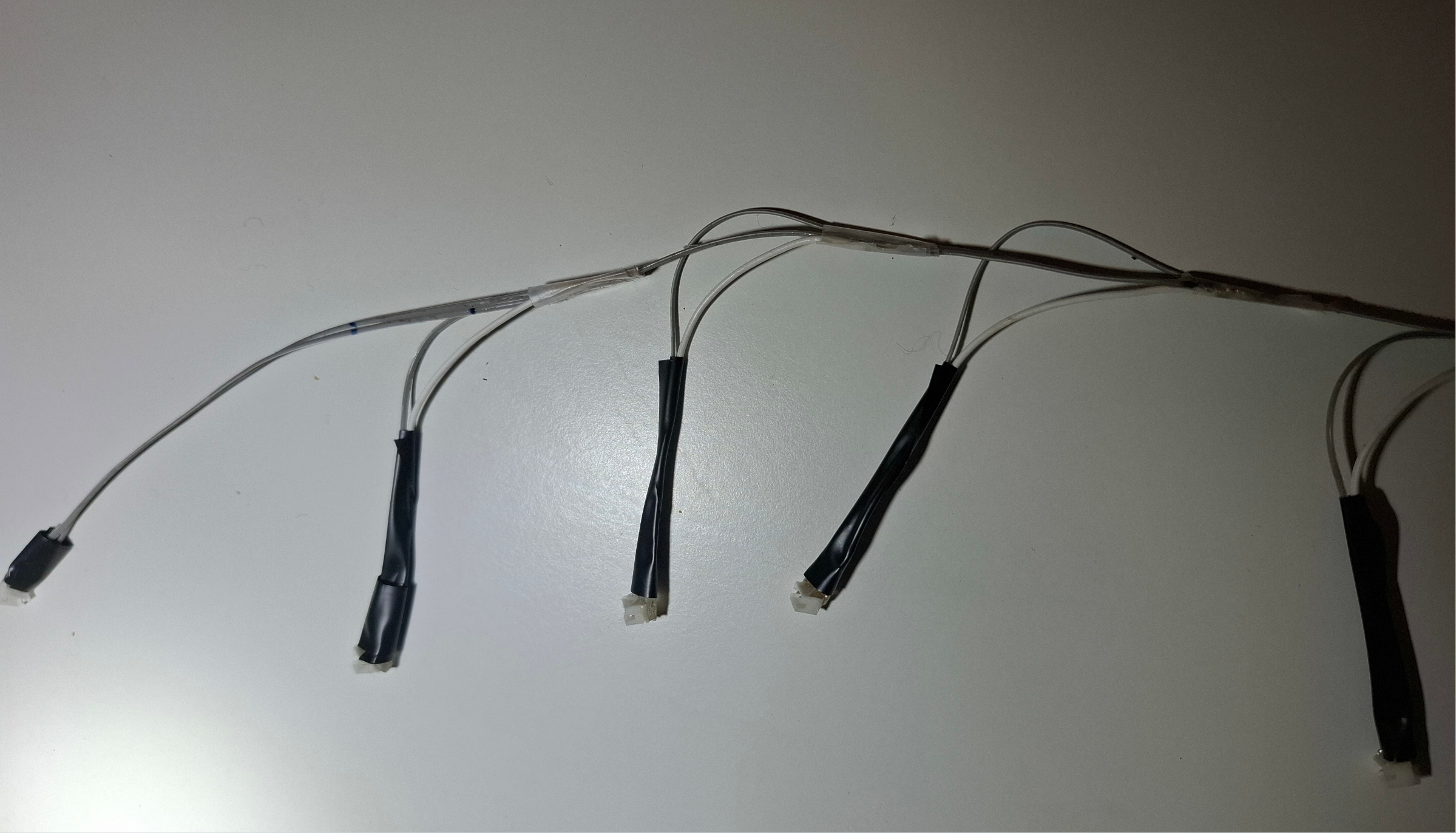
在焊接連接器之前,務必先安裝熱縮管。然後,我會焊接所有連接器,並在所有焊點上塗上環氧膠,然後在環氧膠未乾時,將熱縮管套在連接器上。

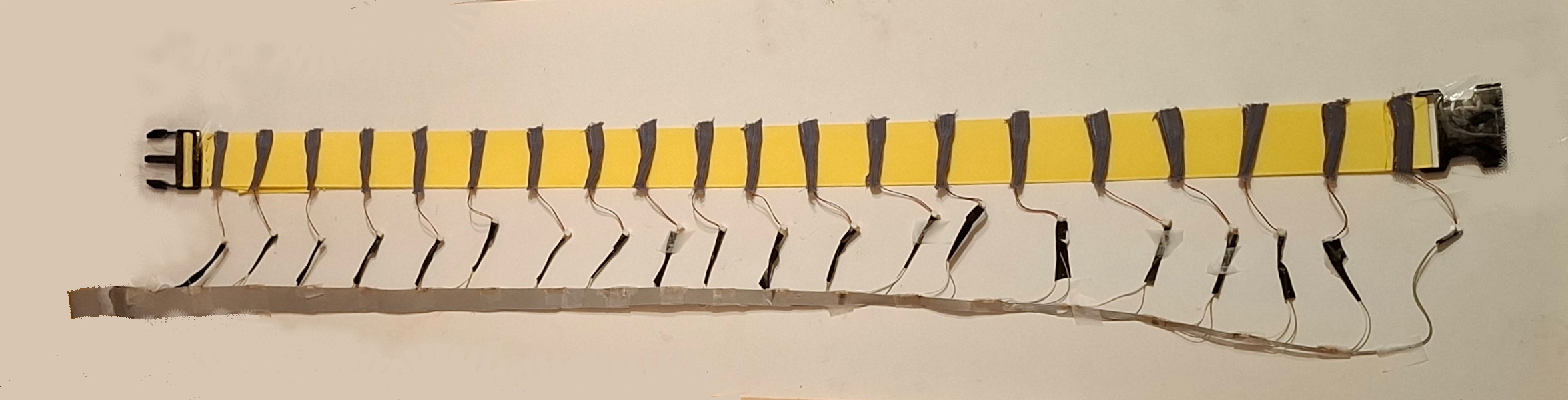
圖片展示了整個扁平電纜。在這個階段,重要的是要測試所有部件,以確保所有焊點都導電。我認為這比之前那種像意大利麵條一樣的單獨電線的解決方案要簡潔得多。

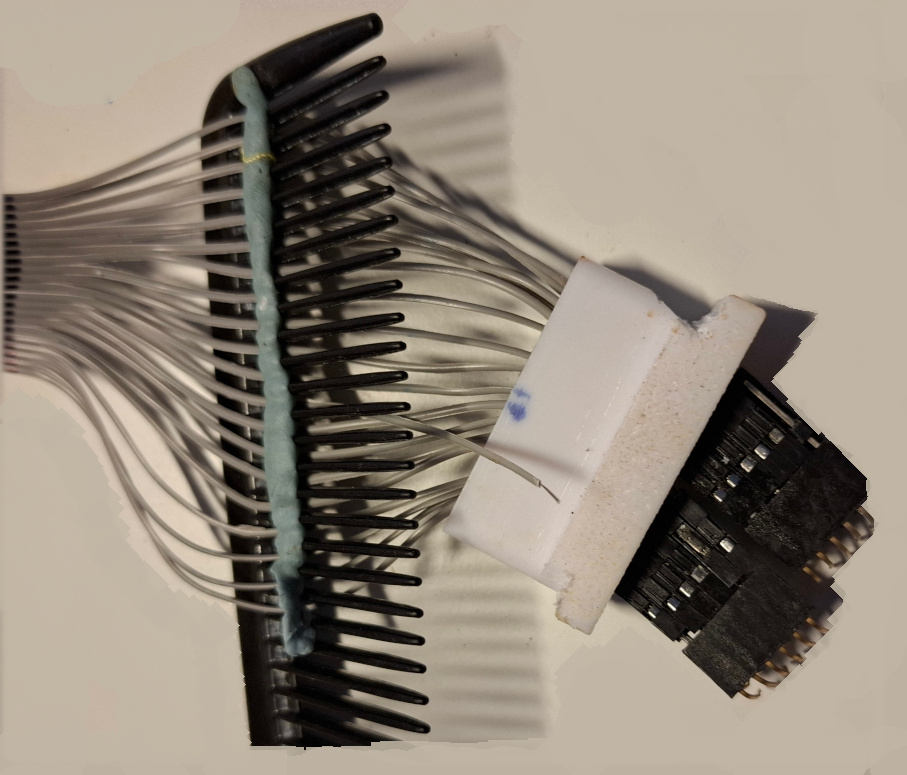
使用梳子整理扁平電纜的兩端。最好將每條電線分別放入梳子內的插腳中。將電線按正確的順序連接到端子上非常重要。當您將杜邦連接器連接到一根電線的末端時,其他電線的末端往往會總是會弄混。如圖所示,使用梳子可以弄混。避免這種情況。
這張圖展示了帶有圓柱形振動馬達的腰帶。現在腰帶上覆蓋著黃色的保護網,但這幅圖展示了帶有圓柱形振動馬達的腰帶。現在腰帶上覆蓋著黃色的保護網,但這張照片中的保護措施尚未完成。黃色網狀膠帶現在只用圓形魔術貼固定。膠帶背面有粘性,很容易粘在腰帶上。在我寫這篇文章的時候,我覺得最好從布料店買一些布料

我買了一套用於電動牙刷的振動馬達(7x25mm),已經安裝了 JST ZH 插頭。我用彈性紡織膠帶縫製了一根灰色的管子。紡織管的直徑約為 8 毫米,長度約為 50毫米。上,我準確地確定了腰帶在腰部的位置,但這條腰帶的釦子很長,我不得不在腰線處稍微調整一下。論如何都能固定住,只在針腳末端打了幾個結,這樣就足夠了。顏色的管子中,將帶插頭的馬達連接到帶狀電纜上,並進行了測試。連接器的可焊性比 JST-SH 更好,因為它的直徑更大。
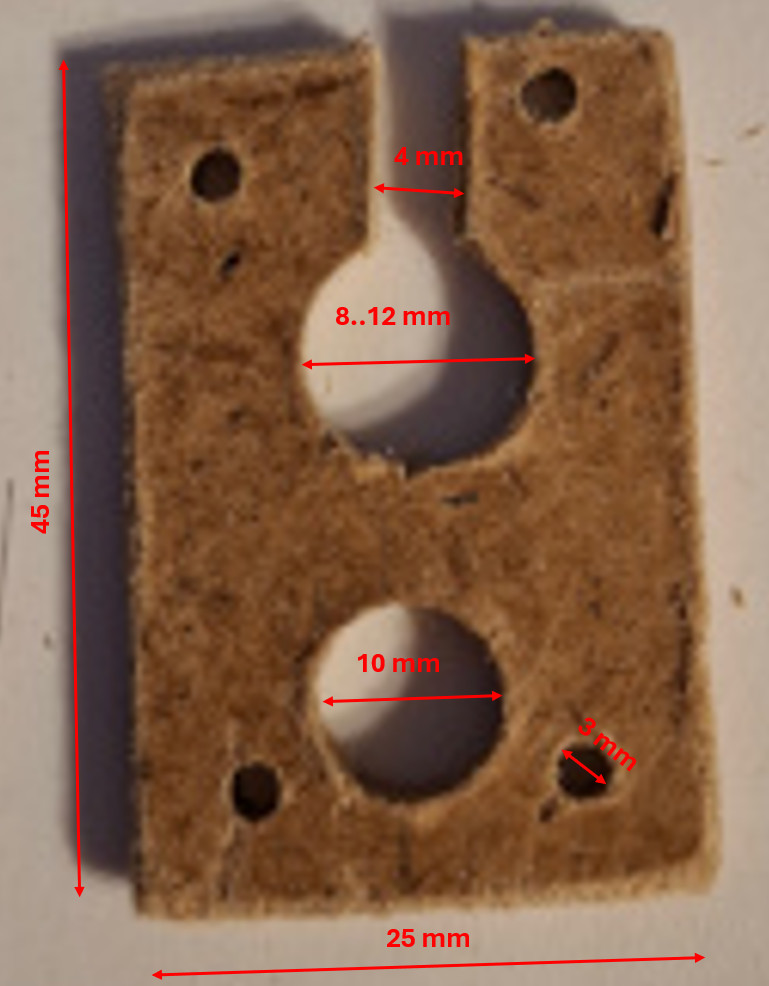
我從當地木工店買了3毫米厚的刨花板。刨花板的厚度必須是3毫米,因為這是振動電機的厚度。合適的高度是45毫米,因為柔性紡織帶的寬度是50毫米,而且我認為振動電機外殼應該更窄一些。我鑽了4個直徑為3毫米的小孔,然後用它們把支架鑽到一個支架上了100010台。毫米的孔,這樣電機就能緊緊地嵌在孔裡。 x 2毫米 x 1毫米的小凹槽,否則馬達就裝不進去。
我沒有專門用於 JST-SH 插頭的壓接工具。因此,我聽了一位 YouTuber的建議,他只在不使用壓接鉗的情況下進行焊接。被錫填滿,然後就無法工作了。
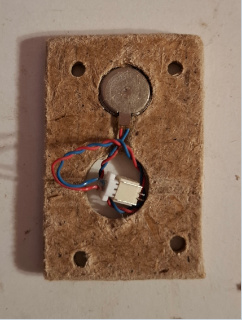
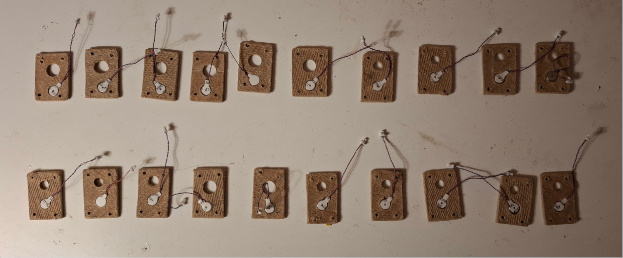
這張圖片展示了所有 20 個馬達支架。
振動馬達上沒有孔可以縫製,而且馬達更適合固定在手機外殼上。所以我覺得最好做這樣一個固定裝置。頂部邊緣和頂部孔之間的上部槽口是必要的,因為否則收縮套管的末端就無法插入支架。
這張圖片展示了透明收縮套管是如何模製在振動馬達外殼周圍的,以便全方位緊密保護它。我用蠟燭加熱熱縮管,我有點擔心馬達會受不了高溫,但它至少在短時間內很好地承受了蠟燭的熱量。

在將振動馬達縫製到彈性套管上之前織物腰帶,我用針和膠帶在彈性織物腰帶(B=80mm)上標記了振動馬達的位置。當然,用裁縫粉筆會更好,但我沒有。因為在縫紉階段,我用針線縫製時必須不斷調整腰帶的位置。

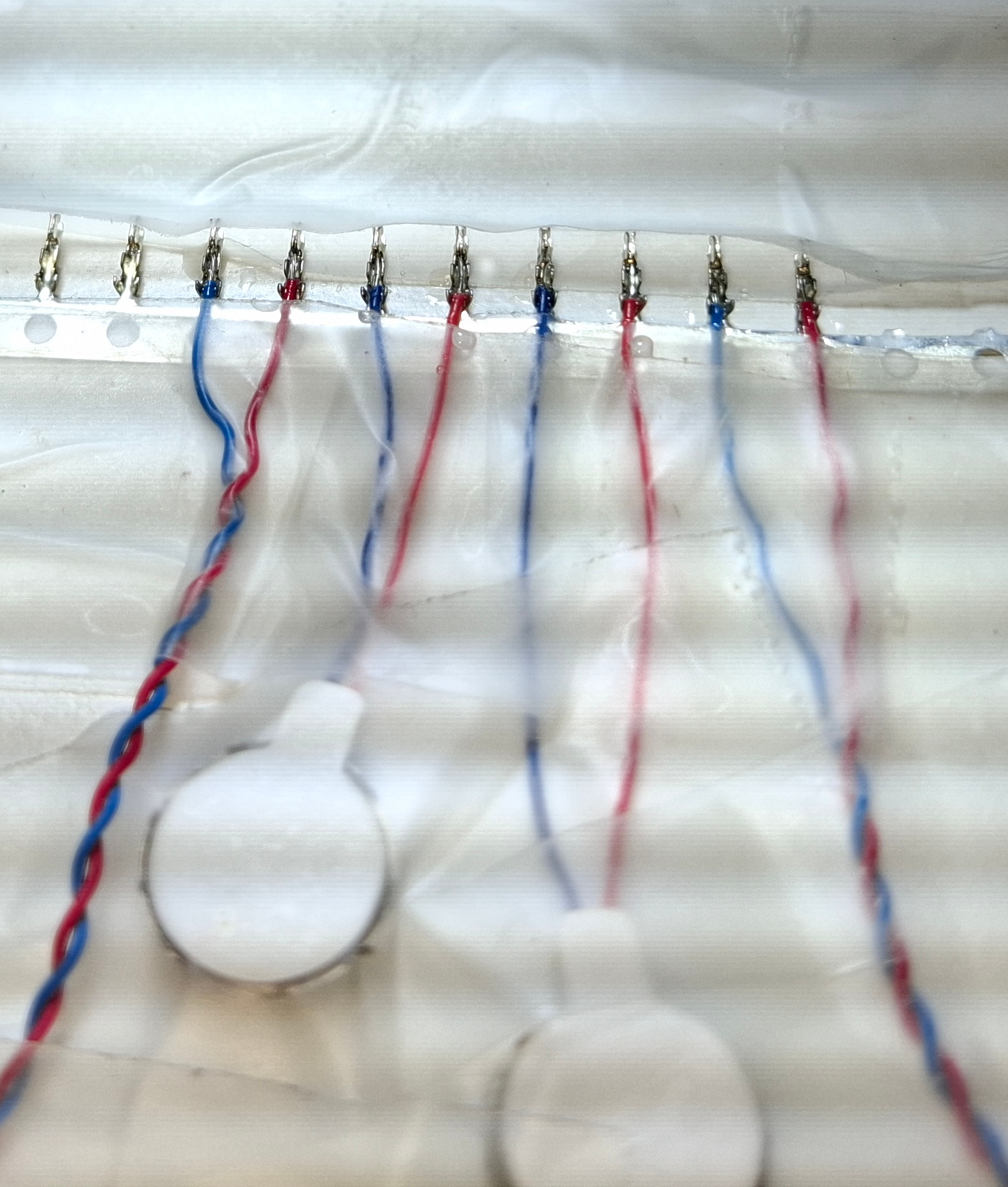
在這張照片中,所有振動馬達都縫在一條彈性紡織帶裡。扁平線纜較長,拉動時,這條扁平線纜最大可容納110厘米的腰圍。但收縮管的拉伸效果不如我預期,它們相當僵硬。拉伸時,它們會向上旋轉,就像是繞著馬達外殼一樣,這不太合適。

我把彈性紡織帶底部的接縫全部縫好了。然後,我只在上部幾處用線縫合了部分,還找到了圓形的尼龍搭扣,粘在彈性紡織帶上。這樣,如果線纜損壞,我就可以更容易地打開這條彈性帶。 30公分長。